26/01/2023
En el vasto universo de las matemáticas aplicadas y la computación, la capacidad de predecir o estimar valores desconocidos a partir de un conjunto de datos conocidos es fundamental. Aquí es donde entra en juego la interpolación, una técnica poderosa que nos permite construir una función, generalmente un polinomio, que pasa exactamente por un conjunto de puntos de datos dados. Entre los diversos métodos de interpolación, el Polinomio de Interpolación de Newton destaca por su elegancia, su naturaleza recursiva y su eficiencia computacional, especialmente cuando se añaden nuevos puntos de datos. Si alguna vez te has preguntado cómo las calculadoras o los sistemas de modelado pueden estimar valores intermedios con sorprendente precisión, este artículo te guiará a través de los principios fundamentales de esta fascinante herramienta matemática.
- ¿Qué es el Polinomio de Interpolación de Newton?
- El Concepto de Diferencias Divididas (Pendientes): Los Bloques Constructivos
- Construyendo el Polinomio de Interpolación de Newton
- Ejemplo Detallado: De Datos a Polinomio
- Ventajas y Desventajas del Método de Newton
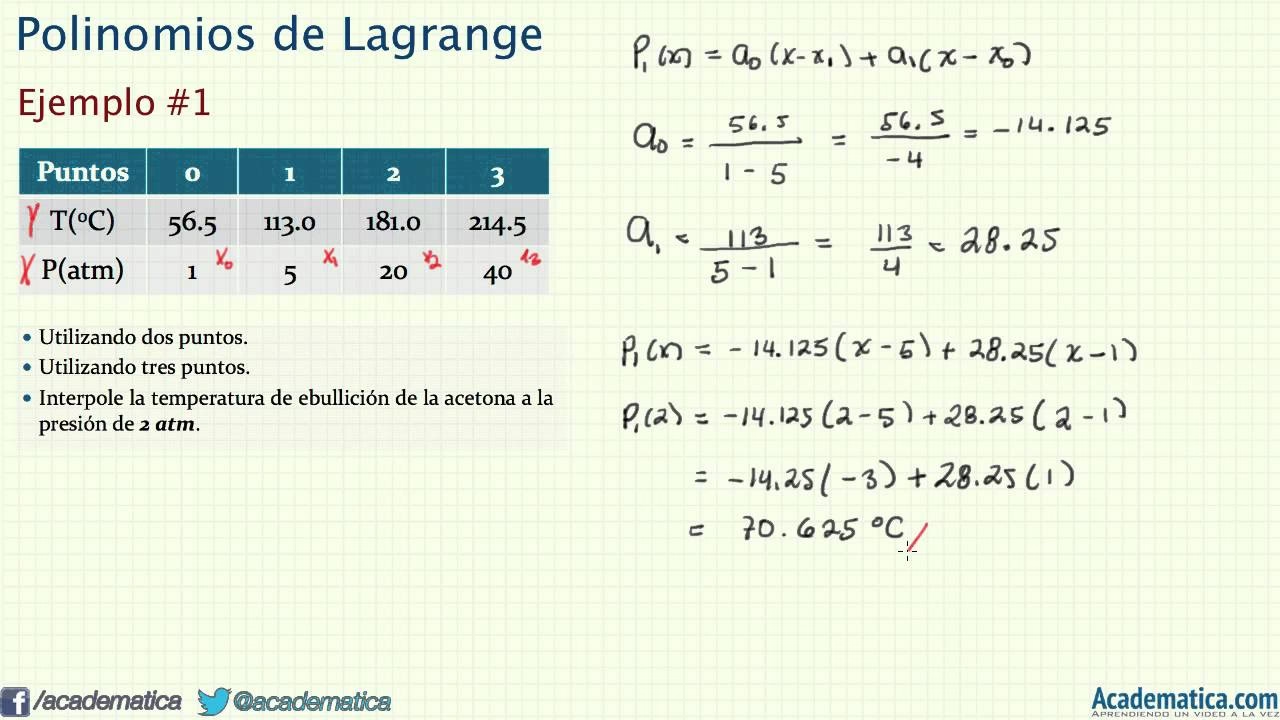
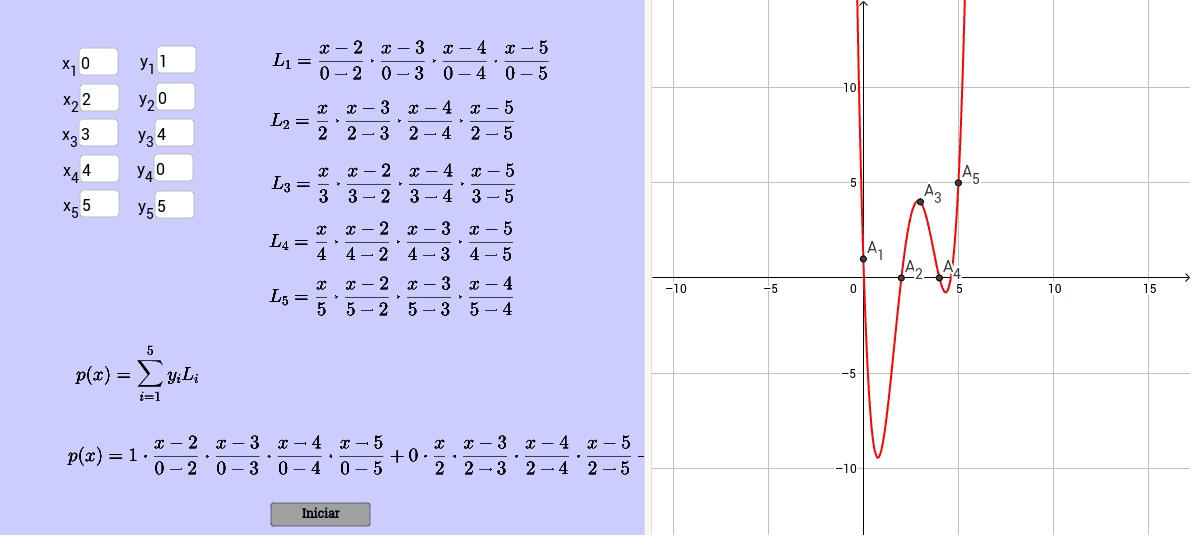
- Newton vs. Lagrange: Una Breve Comparación
- Aplicaciones en el Mundo Real
- Preguntas Frecuentes (FAQ)
¿Qué es el Polinomio de Interpolación de Newton?
El Polinomio de Interpolación de Newton es una forma de construir un polinomio que pasa por un conjunto de puntos de datos discretos. A diferencia de otros métodos que pueden requerir la resolución de sistemas de ecuaciones complejos, el enfoque de Newton se basa en la idea de las "diferencias divididas" (también conocidas como pendientes generalizadas), que simplifican enormemente el proceso de construcción del polinomio. Imagina que tienes una serie de mediciones de temperatura en diferentes momentos del día y quieres estimar la temperatura en un momento específico no medido. El polinomio de Newton te proporciona una función que modela esa relación, permitiéndote hacer esa estimación.
El Concepto de Diferencias Divididas (Pendientes): Los Bloques Constructivos
El corazón del método de Newton reside en la definición recursiva de las diferencias divididas. Estas diferencias son, en esencia, una generalización del concepto de pendiente que conocemos de la geometría lineal. Una pendiente tradicional nos dice cuánto cambia 'y' por cada cambio en 'x' entre dos puntos. Las diferencias divididas extienden esta idea a múltiples puntos, capturando la 'curvatura' de los datos.
Para entenderlo, consideremos los siguientes pasos:
La pendiente de orden 0 es simplemente el valor de la función en un punto dado:
f0(xi) = yiLa pendiente de orden 1 es la pendiente familiar entre dos puntos (x0, y0) y (x1, y1):
f1(x0, x1) = (f0(x1) - f0(x0)) / (x1 - x0)Esto es simplemente (y1 - y0) / (x1 - x0).
Para la pendiente de orden 2, la idea se vuelve recursiva. Usamos las pendientes de orden 1 ya calculadas:
f2(x0, x1, x2) = (f1(x1, x2) - f1(x0, x1)) / (x2 - x0)Aquí, f1(x1, x2) es la pendiente entre los puntos (x1, y1) y (x2, y2), y f1(x0, x1) es la pendiente entre (x0, y0) y (x1, y1). El denominador (x2 - x0) es la "distancia" total entre el primer y el último punto involucrado en esta diferencia de orden 2.
En general, la fórmula recursiva para la pendiente de orden 'i' es:
fi(x0, x1, ..., xi-1, xi) = (fi-1(x1, ..., xi-1, xi) - fi-1(x0, x1, ..., xi-1)) / (xi - x0)Esta fórmula nos dice que para calcular una diferencia dividida de orden 'i', necesitamos dos diferencias divididas de orden 'i-1': una que comienza desde el segundo punto (x1) hasta el último (xi), y otra que va desde el primer punto (x0) hasta el penúltimo (xi-1). La diferencia entre estas dos se divide por la diferencia entre el último y el primer punto de la secuencia completa (xi - x0). Este proceso se repite hasta que se calculan todas las diferencias necesarias para el grado del polinomio deseado.
Construyendo el Polinomio de Interpolación de Newton
Una vez que hemos calculado las diferencias divididas, la construcción del polinomio es sorprendentemente directa y también recursiva. Cada término adicional en el polinomio mejora la aproximación, incorporando la información de un nuevo punto de datos.
El polinomio de grado 0 es simplemente el valor inicial:
p0(x) = f0(x0) = y0El polinomio de grado 1 (una línea recta) añade el primer término de diferencia dividida multiplicado por (x - x0):
p1(x) = p0(x) + f1(x0, x1) * (x - x0)El polinomio de grado 2 añade el siguiente término, que involucra la diferencia dividida de orden 2 y un producto de términos (x - x0)(x - x1):
p2(x) = p1(x) + f2(x0, x1, x2) * (x - x0) * (x - x1)En su forma general, el polinomio de Newton de grado 'n' es:
pn(x) = f0(x0) + f1(x0, x1)(x - x0) + f2(x0, x1, x2)(x - x0)(x - x1) + ... + fn(x0, ..., xn) ∏j=0n-1 (x - xj)O, de manera recursiva, como se presenta en la definición:
pi(x) = pi-1(x) + fi(x0, x1, ..., xi-1, xi) ∏j=0i-1 (x - xj)Esta estructura es clave. Cada nuevo término se construye a partir del polinomio anterior, añadiendo un nuevo coeficiente (la diferencia dividida) multiplicado por un producto de factores (x - xj). Esto significa que si decides añadir un nuevo punto de datos, no necesitas recalcular todo desde cero; simplemente añades un nuevo término al polinomio existente, lo que lo hace computacionalmente muy eficiente.
Ejemplo Detallado: De Datos a Polinomio
Para ilustrar mejor este proceso, utilizaremos el ejemplo proporcionado. Supongamos que tenemos los siguientes puntos de datos:
- x0 = 1, f0(1) = 6
- x1 = 2, f0(2) = 9
- x2 = 3, f0(3) = 2
- x3 = 4, f0(4) = 5
Queremos construir un polinomio que pase por estos cuatro puntos.
Paso 1: Calcular las diferencias divididas de orden 1
f1(x0, x1) = (f0(x1) - f0(x0)) / (x1 - x0) = (9 - 6) / (2 - 1) = 3 / 1 = 3f1(x1, x2) = (f0(x2) - f0(x1)) / (x2 - x1) = (2 - 9) / (3 - 2) = -7 / 1 = -7f1(x2, x3) = (f0(x3) - f0(x2)) / (x3 - x2) = (5 - 2) / (4 - 3) = 3 / 1 = 3Paso 2: Calcular las diferencias divididas de orden 2
f2(x0, x1, x2) = (f1(x1, x2) - f1(x0, x1)) / (x2 - x0) = (-7 - 3) / (3 - 1) = -10 / 2 = -5f2(x1, x2, x3) = (f1(x2, x3) - f1(x1, x2)) / (x3 - x1) = (3 - (-7)) / (4 - 2) = (3 + 7) / 2 = 10 / 2 = 5Paso 3: Calcular la diferencia dividida de orden 3
f3(x0, x1, x2, x3) = (f2(x1, x2, x3) - f2(x0, x1, x2)) / (x3 - x0) = (5 - (-5)) / (4 - 1) = (5 + 5) / 3 = 10 / 3Podemos organizar estos cálculos en una tabla para mayor claridad, lo que se conoce como tabla de diferencias divididas:
| xi | f[xi] | f[xi, xi+1] | f[xi, xi+1, xi+2] | f[xi, xi+1, xi+2, xi+3] |
|---|---|---|---|---|
| 1 | 6 | |||
| 3 | ||||
| 2 | 9 | -5 | ||
| -7 | ||||
| 3 | 2 | 5 | 10/3 | |
| 3 | ||||
| 4 | 5 |
Los coeficientes de nuestro polinomio de Newton son los primeros valores de cada columna de diferencias divididas (la diagonal superior de la tabla): f0(x0) = 6, f1(x0, x1) = 3, f2(x0, x1, x2) = -5, y f3(x0, x1, x2, x3) = 10/3.
Paso 4: Construir el Polinomio
p0(x) = 6p1(x) = p0(x) + f1(x0, x1) * (x - x0) = 6 + 3 * (x - 1)p2(x) = p1(x) + f2(x0, x1, x2) * (x - x0) * (x - x1) = 6 + 3 * (x - 1) - 5 * (x - 1) * (x - 2)p3(x) = p2(x) + f3(x0, x1, x2, x3) * (x - x0) * (x - x1) * (x - x2) = 6 + 3 * (x - 1) - 5 * (x - 1) * (x - 2) + (10/3) * (x - 1) * (x - 2) * (x - 3)Este p3(x) es el polinomio de interpolación de Newton que pasa por los cuatro puntos dados. Para probarlo, si evaluamos p3(1), p3(2), p3(3) o p3(4), obtendremos 6, 9, 2 y 5 respectivamente. Podemos usarlo para estimar valores intermedios, como p1(1.5) que resulta en 7.5, como se muestra en el ejemplo. Este valor tiene sentido, ya que para una interpolación lineal entre (1,6) y (2,9), el punto medio (1.5) debería ser el punto medio de los valores y (7.5).
Ventajas y Desventajas del Método de Newton
El Polinomio de Interpolación de Newton no es el único método para realizar interpolación, pero posee características distintivas que lo hacen particularmente útil en ciertas situaciones.
Ventajas:
- Construcción Incremental: Como hemos visto, el polinomio se construye término a término. Si se añade un nuevo punto de datos, no es necesario recalcular todo el polinomio desde cero. Simplemente se calcula una nueva diferencia dividida de orden superior y se añade un nuevo término al polinomio existente. Esto contrasta con el método de interpolación de Lagrange, donde cada vez que se añade un punto, se debe reconstruir el polinomio completo.
- Claridad de Coeficientes: Los coeficientes del polinomio de Newton son directamente las diferencias divididas, lo que puede ofrecer una visión más intuitiva de cómo la 'curvatura' de la función se va añadiendo con cada grado.
- Estabilidad Numérica: Generalmente, es más estable numéricamente que el método de Lagrange para un gran número de puntos, aunque ambos pueden sufrir de oscilaciones para datos con alto grado de variación.
- Facilidad de Programación: Su naturaleza recursiva y el uso de una tabla de diferencias divididas lo hacen relativamente sencillo de implementar en algoritmos computacionales.
Desventajas:
- Sensibilidad a los Puntos: La elección de los puntos de interpolación (los xi) puede afectar la precisión y la estabilidad del polinomio, especialmente en los bordes del intervalo de los datos.
- Fenómeno de Runge: Al igual que otros métodos de interpolación polinómica de alto grado, el polinomio de Newton puede exhibir oscilaciones significativas entre los puntos de datos, especialmente cuando los puntos están uniformemente espaciados y la función subyacente es compleja. Esto se conoce como el fenómeno de Runge y puede llevar a grandes errores de interpolación.
- Requiere Distintos Puntos x: No se puede usar si hay dos puntos con la misma coordenada x pero diferente coordenada y, ya que esto violaría la definición de función.
Newton vs. Lagrange: Una Breve Comparación
Es útil comparar el Polinomio de Newton con el Polinomio de Interpolación de Lagrange, otro método común. Aunque ambos producen el mismo polinomio si se usan los mismos puntos (el polinomio interpolador es único), difieren en su construcción y propiedades computacionales.
| Característica | Polinomio de Newton | Polinomio de Lagrange |
|---|---|---|
| Construcción | Incremental, usa diferencias divididas. | No incremental, cada término es un producto de factores. |
| Adición de Puntos | Eficiente; se añade un nuevo término. | Ineficiente; requiere recalcular todo el polinomio. |
| Forma de los Coeficientes | Diferencias divididas. | Valores f(xi) multiplicados por funciones base Li(x). |
| Intuición | Basado en pendientes generalizadas. | Basado en la idea de que Li(xj) = 1 si i=j, 0 si i≠j. |
| Estabilidad Numérica | Generalmente mejor para muchos puntos. | Puede ser más propenso a errores de redondeo para muchos puntos. |
En resumen, si esperas añadir puntos de datos de forma iterativa, el método de Newton es superior. Si solo necesitas construir un polinomio para un conjunto fijo de puntos, ambos métodos son válidos, aunque Newton es a menudo preferido por su estructura más ordenada y menos propensa a errores en implementaciones computacionales complejas.
Aplicaciones en el Mundo Real
El Polinomio de Interpolación de Newton, y la interpolación polinómica en general, tienen una amplia gama de aplicaciones prácticas.
- Ingeniería y Ciencia: Estimación de valores intermedios en tablas de datos experimentales, como propiedades de materiales, temperaturas, presiones o velocidades, donde las mediciones exactas en cada punto son inviables.
- Gráficos por Computadora: Creación de curvas suaves que pasan por puntos de control definidos por el usuario, lo que es fundamental en el diseño asistido por computadora (CAD) y la animación.
- Análisis Numérico: Base para métodos de integración numérica y derivación numérica, así como para la resolución de ecuaciones diferenciales.
- Economía y Finanzas: Modelado de tendencias de datos, como precios de acciones o tasas de interés, para predecir comportamientos futuros o estimar valores en momentos no observados.
- Procesamiento de Señales: Reconstrucción de señales analógicas a partir de muestras discretas.
En todos estos campos, la capacidad de interpolar con precisión y flexibilidad es crucial para tomar decisiones informadas y desarrollar modelos robustos.
Preguntas Frecuentes (FAQ)
¿Para qué sirve el Polinomio de Interpolación de Newton?
Sirve para construir un polinomio que pasa exactamente por un conjunto de puntos de datos dados. Esto permite estimar valores de la función en puntos intermedios que no fueron medidos o conocidos inicialmente.
¿Cuál es la diferencia entre interpolación y extrapolación?
La interpolación estima valores dentro del rango de los puntos de datos conocidos. La extrapolación estima valores fuera de ese rango. El Polinomio de Newton está diseñado principalmente para interpolación; la extrapolación con polinomios de alto grado puede ser muy imprecisa y poco fiable.
¿Qué son las "diferencias divididas"?
Las diferencias divididas son los coeficientes del Polinomio de Newton. Son una generalización recursiva del concepto de pendiente, que capturan cómo la función cambia entre múltiples puntos de datos. Son fundamentales para la construcción incremental del polinomio.
¿Siempre se debe usar el Polinomio de Newton?
No siempre. Su elección depende de la situación. Si la función subyacente es muy oscilatoria o si se tiene un gran número de puntos uniformemente espaciados, otros métodos como la interpolación por splines (que usan polinomios de bajo grado en segmentos) pueden ser más adecuados para evitar el fenómeno de Runge y asegurar una mayor suavidad.
¿Es el Polinomio de Newton el mismo que el de Lagrange?
Si se usan los mismos puntos de datos, el polinomio resultante será el mismo, ya que el polinomio interpolador que pasa por un conjunto de puntos distintos es único. Sin embargo, la forma en que se construye el polinomio y la eficiencia computacional para añadir nuevos puntos difieren significativamente entre ambos métodos.
Si quieres conocer otros artículos parecidos a Polinomio de Interpolación de Newton: Una Guía Completa puedes visitar la categoría Cálculos.