05/01/2023
En el vasto y fascinante universo de la física, pocas herramientas son tan fundamentales y omnipresentes como la ecuación de posición. Esta fórmula no es solo un conjunto de símbolos matemáticos; es una llave maestra que nos permite desentrañar uno de los fenómenos más básicos y complejos de la naturaleza: el movimiento. Desde la trayectoria de una pelota lanzada hasta la órbita de un planeta distante, comprender dónde se encontrará un objeto en un momento determinado es crucial para innumerables aplicaciones científicas y tecnológicas. Si alguna vez te has preguntado cómo los ingenieros calculan la ruta de un cohete o cómo los atletas analizan su desempeño, la respuesta, en gran medida, reside en el dominio de esta ecuación esencial.
La capacidad de predecir la ubicación de un cuerpo en el tiempo es el pilar de la mecánica clásica. Nos permite no solo describir lo que ya ha sucedido, sino, lo que es aún más emocionante, anticipar lo que está por venir. Acompáñanos en este viaje para explorar en profundidad qué es la ecuación de posición, cómo se formula para diferentes tipos de movimiento y por qué su comprensión es indispensable para cualquiera que desee entender el funcionamiento del mundo físico.
- ¿Qué es la Posición y por qué es Importante?
- La Ecuación de Posición en el Movimiento Rectilíneo Uniforme (MRU)
- La Ecuación de Posición en el Movimiento Rectilíneo Uniformemente Acelerado (MRUA)
- Entendiendo las Variables y sus Unidades
- La Naturaleza Vectorial de la Posición
- Derivación Conceptual de la Ecuación de Posición
- Aplicaciones Prácticas de la Ecuación de Posición
- Tabla Comparativa: MRU vs. MRUA
- Preguntas Frecuentes sobre la Ecuación de Posición
- ¿Qué significa x₀ en la ecuación de posición?
- ¿Cuándo debo usar la ecuación de MRU y cuándo la de MRUA?
- ¿La ecuación de posición siempre da un valor positivo?
- ¿Cómo se relaciona la ecuación de posición con la velocidad y la aceleración?
- ¿Puedo usar estas ecuaciones para movimiento en dos o tres dimensiones?
¿Qué es la Posición y por qué es Importante?
Antes de sumergirnos en las ecuaciones, es vital comprender el concepto de posición. En física, la posición se refiere a la ubicación de un objeto en el espacio en un momento dado. Para definirla, siempre necesitamos un punto de referencia o un origen, así como un sistema de coordenadas (por ejemplo, un eje x, un plano xy o un espacio xyz). La posición no es solo un número; es una magnitud vectorial, lo que significa que tiene tanto magnitud (la distancia desde el origen) como dirección. Por ejemplo, decir que un coche está a 100 metros no es suficiente; necesitamos saber si está a 100 metros al norte, al sur, al este o al oeste de nuestro punto de referencia.
La unidad estándar de posición en el Sistema Internacional de Unidades (SI) es el metro (m). La importancia de la posición radica en que es el punto de partida para describir cualquier tipo de movimiento. Sin una comprensión clara de la posición, no podemos definir conceptos como el desplazamiento (el cambio de posición), la velocidad (la tasa de cambio de posición) o la aceleración (la tasa de cambio de velocidad). Es la base sobre la cual se construye toda la cinemática, la rama de la mecánica que describe el movimiento sin considerar las fuerzas que lo causan.
La Ecuación de Posición en el Movimiento Rectilíneo Uniforme (MRU)
El Movimiento Rectilíneo Uniforme (MRU) es el tipo de movimiento más sencillo de analizar. Se caracteriza porque un objeto se mueve en línea recta a una velocidad constante. Esto implica que su aceleración es nula (cero). En este escenario idealizado, la ecuación de posición es relativamente simple y muy intuitiva.
La ecuación para el MRU es:
x(t) = x₀ + v * t
Desglosemos cada término de esta fórmula fundamental:
x(t): Representa la posición final del objeto en el instante de tiempot. Es lo que queremos calcular.x₀(se lee 'equis sub cero'): Es la posición inicial del objeto en el momentot = 0. Es el punto de partida.v: Es la velocidad constante del objeto. Dado que la velocidad es constante en MRU, no hay un cambio en su valor a lo largo del tiempo.t: Es el intervalo de tiempo transcurrido desde el momento inicial (t = 0) hasta el instante en que queremos conocer la posición.
Esta ecuación nos dice que la posición final de un objeto es igual a su posición inicial más el desplazamiento que ha recorrido debido a su velocidad constante durante el tiempo transcurrido. Por ejemplo, si un coche parte de la posición 0 metros (x₀ = 0 m) con una velocidad constante de 10 m/s (v = 10 m/s), después de 5 segundos (t = 5 s), su posición será x(5) = 0 + 10 * 5 = 50 metros.
La Ecuación de Posición en el Movimiento Rectilíneo Uniformemente Acelerado (MRUA)
El Movimiento Rectilíneo Uniformemente Acelerado (MRUA) es una descripción más realista de muchos movimientos que observamos en la vida cotidiana. En este tipo de movimiento, el objeto sigue una trayectoria recta, pero su velocidad no es constante; en cambio, cambia a una tasa constante, lo que significa que tiene una aceleración constante y distinta de cero. La gravedad, por ejemplo, induce un MRUA en los objetos que caen libremente.
La ecuación de posición para el MRUA es más compleja, ya que debe tener en cuenta el efecto de la aceleración sobre la velocidad y, por ende, sobre la posición. La fórmula es la siguiente:
x(t) = x₀ + v₀ * t + (1/2) * a * t²
Analicemos cada componente de esta ecuación crucial:
x(t): Al igual que en el MRU, es la posición final del objeto en el instante de tiempot.x₀: Es la posición inicial del objeto en el momentot = 0.v₀(se lee 'uve sub cero'): Es la velocidad inicial del objeto en el momentot = 0. A diferencia del MRU, aquí la velocidad inicial es un factor, ya que la velocidad cambiará.a: Es la aceleración constante del objeto. Esta aceleración puede ser positiva (si el objeto se acelera en la dirección de su movimiento) o negativa (si se desacelera o cambia de dirección).t: Es el intervalo de tiempo transcurrido desde el inicio del movimiento.
Esta ecuación se compone de tres términos que representan diferentes contribuciones al desplazamiento total:
x₀: La posición de partida.v₀ * t: El desplazamiento que habría ocurrido si el objeto se hubiera movido solo con su velocidad inicial (como en un MRU).(1/2) * a * t²: El desplazamiento adicional (o la reducción de desplazamiento) debido a la aceleración constante. Este término cuadrático con respecto al tiempo es lo que le da a los gráficos de posición vs. tiempo para MRUA su forma parabólica.
Imaginemos que una bola se lanza verticalmente hacia arriba desde el suelo (x₀ = 0 m) con una velocidad inicial de 20 m/s (v₀ = 20 m/s). La aceleración debido a la gravedad es aproximadamente -9.8 m/s² (a = -9.8 m/s², negativa porque actúa hacia abajo). Para encontrar su posición después de 3 segundos (t = 3 s), usaríamos: x(3) = 0 + (20 * 3) + (1/2) * (-9.8) * (3)² = 60 - 4.9 * 9 = 60 - 44.1 = 15.9 metros. La bola estaría a 15.9 metros de altura.
Entendiendo las Variables y sus Unidades
Para aplicar correctamente las ecuaciones de posición, es fundamental comprender cada variable y utilizar las unidades consistentes del Sistema Internacional (SI):
- Posición (x, y, z): Representa la ubicación. Su unidad es el metro (m). Es una magnitud vectorial.
- Tiempo (t): El intervalo de duración del movimiento. Su unidad es el segundo (s). Es una magnitud escalar.
- Velocidad (v, v₀): La tasa de cambio de posición. Su unidad es el metro por segundo (m/s). Es una magnitud vectorial, con dirección y sentido.
- Aceleración (a): La tasa de cambio de velocidad. Su unidad es el metro por segundo al cuadrado (m/s²). Es una magnitud vectorial.
Es crucial prestar atención a los signos de la velocidad y la aceleración, ya que indican la dirección. Por ejemplo, una velocidad negativa puede significar movimiento hacia la izquierda o hacia abajo, dependiendo de la convención de tu sistema de coordenadas. De igual manera, una aceleración negativa puede indicar una desaceleración o una aceleración en la dirección opuesta al movimiento.
La Naturaleza Vectorial de la Posición
Aunque hemos presentado las ecuaciones en una dimensión (a lo largo de un eje 'x'), la posición es intrínsecamente un vector en el espacio tridimensional. Esto significa que un objeto puede moverse simultáneamente en las direcciones x, y, y z. Sin embargo, la belleza de la física es que el movimiento en cada una de estas dimensiones es a menudo independiente.
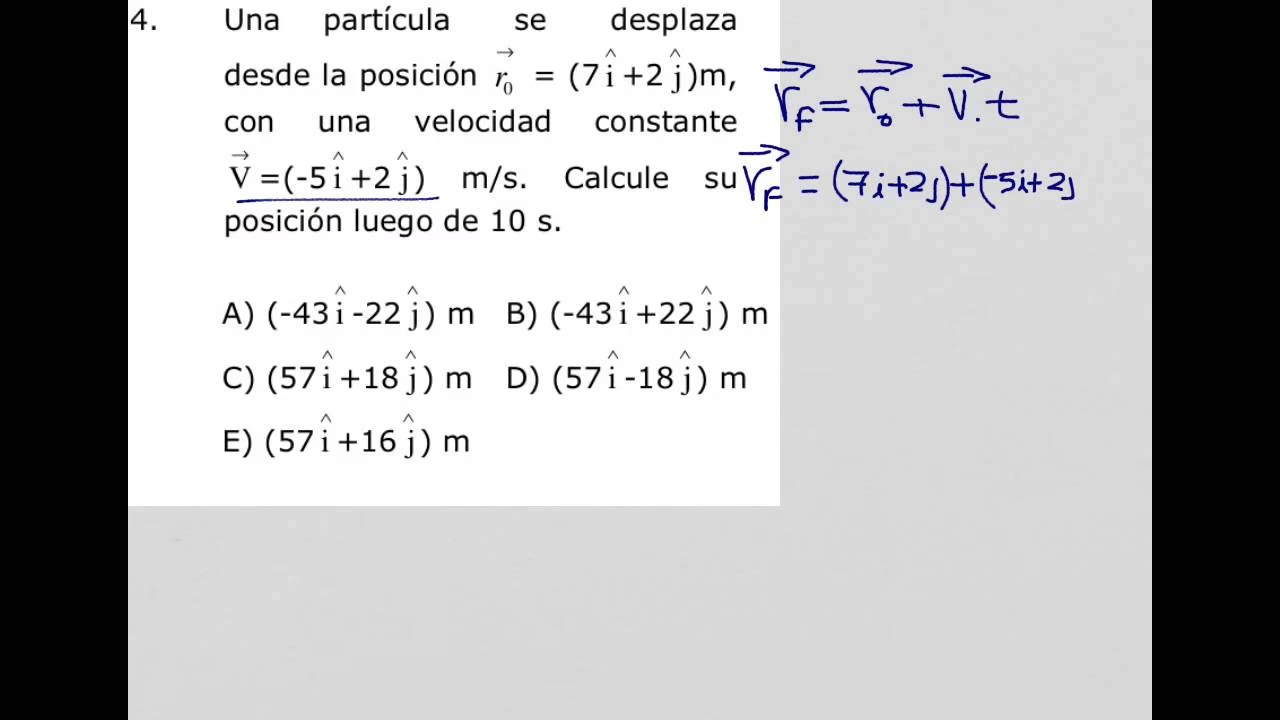
Para el movimiento en dos o tres dimensiones (como la trayectoria de un proyectil), simplemente aplicamos la misma ecuación de posición por separado a cada componente del movimiento. Por ejemplo, para un movimiento en el plano XY, tendríamos:
x(t) = x₀ + v₀ₓ * t + (1/2) * aₓ * t²y(t) = y₀ + v₀ᵧ * t + (1/2) * aᵧ * t²
Donde v₀ₓ y v₀ᵧ son las componentes x e y de la velocidad inicial, y aₓ y aᵧ son las componentes x e y de la aceleración. El tiempo (t) es la única variable que es común a todas las dimensiones, sirviendo como el 'puente' entre ellas. Este enfoque de descomponer el movimiento en sus componentes vectoriales simplifica enormemente el análisis de trayectorias complejas.
Derivación Conceptual de la Ecuación de Posición
Las ecuaciones de posición no surgieron de la nada; son el resultado de la relación fundamental entre posición, velocidad y aceleración. Conceptualmente, la velocidad es la tasa a la que cambia la posición, y la aceleración es la tasa a la que cambia la velocidad. En términos de cálculo, la velocidad es la derivada de la posición con respecto al tiempo, y la aceleración es la derivada de la velocidad con respecto al tiempo (o la segunda derivada de la posición).
Para entender cómo se llega a la ecuación de MRUA, podemos pensar en el proceso inverso, la integración. Si tenemos una aceleración constante (a), podemos 'integrarla' con respecto al tiempo para obtener la ecuación de la velocidad:
v(t) = v₀ + a * t
Esta ecuación nos dice que la velocidad en cualquier momento es igual a la velocidad inicial más el cambio de velocidad debido a la aceleración durante el tiempo transcurrido. Si luego 'integramos' esta ecuación de velocidad con respecto al tiempo, obtendremos la ecuación de posición:
x(t) = x₀ + v₀ * t + (1/2) * a * t²
Este proceso muestra cómo la aceleración, al actuar sobre la velocidad a lo largo del tiempo, produce un cambio no lineal en la posición. Es una demostración elegante de cómo conceptos aparentemente simples se entrelazan para describir fenómenos complejos del movimiento.
Aplicaciones Prácticas de la Ecuación de Posición
Las ecuaciones de posición son mucho más que meras fórmulas académicas; son herramientas indispensables con aplicaciones que abarcan casi todos los campos de la ciencia y la ingeniería:
- Ingeniería Civil y Arquitectura: Para calcular la trayectoria de objetos en construcción, el impacto de vientos o sismos en estructuras, o la dinámica de puentes y edificios.
- Ingeniería Automotriz y Aeroespacial: Fundamentales para el diseño de vehículos, sistemas de frenado, control de trayectorias de misiles, satélites y naves espaciales. Cada lanzamiento espacial se basa en cálculos precisos de posición.
- Deportes y Biomecánica: Entrenadores y científicos del deporte utilizan estas ecuaciones para analizar el rendimiento de los atletas, optimizar la técnica en lanzamientos (baloncesto, jabalina), saltos o carreras, y para predecir la trayectoria de una pelota.
- Astronomía: Para predecir las órbitas de planetas, cometas y asteroides, así como para planificar misiones espaciales y entender el movimiento de galaxias.
- Criminalística y Reconstrucción de Accidentes: Los expertos las emplean para determinar la velocidad, la posición y el tiempo de los vehículos o personas involucradas en un accidente, reconstruyendo los eventos previos al impacto.
- Animación y Videojuegos: Los motores de física de los videojuegos utilizan estas ecuaciones para simular el movimiento realista de personajes y objetos, desde la caída de una manzana hasta la colisión de vehículos.
La ubicuidad de estas ecuaciones subraya su poder y versatilidad como base para entender y manipular el movimiento en nuestro mundo.
Tabla Comparativa: MRU vs. MRUA
Para consolidar la comprensión de ambos tipos de movimiento y sus respectivas ecuaciones de posición, la siguiente tabla ofrece un resumen comparativo:
| Característica | Movimiento Rectilíneo Uniforme (MRU) | Movimiento Rectilíneo Uniformemente Acelerado (MRUA) |
|---|---|---|
| Velocidad | Constante (no cambia) | Variable (cambia linealmente con el tiempo) |
| Aceleración | Nula (cero, a = 0) | Constante (distinta de cero, a ≠ 0) |
| Ecuación de Posición | x(t) = x₀ + v * t | x(t) = x₀ + v₀ * t + (1/2) * a * t² |
| Gráfico Posición vs. Tiempo | Línea recta (pendiente = velocidad) | Parábola (curva) |
| Gráfico Velocidad vs. Tiempo | Línea horizontal (constante) | Línea recta con pendiente (pendiente = aceleración) |
Preguntas Frecuentes sobre la Ecuación de Posición
¿Qué significa x₀ en la ecuación de posición?
x₀ (equis sub cero) representa la posición inicial del objeto en el instante de tiempo t = 0. Es el punto de partida desde el cual se comienza a medir el movimiento.
¿Cuándo debo usar la ecuación de MRU y cuándo la de MRUA?
Debes usar la ecuación de MRU (x(t) = x₀ + v * t) cuando el objeto se mueve en línea recta con una velocidad constante, es decir, sin aceleración. Debes usar la ecuación de MRUA (x(t) = x₀ + v₀ * t + (1/2) * a * t²) cuando el objeto se mueve en línea recta con una aceleración constante (su velocidad está cambiando a una tasa constante).
¿La ecuación de posición siempre da un valor positivo?
No, la ecuación de posición puede dar un valor positivo, negativo o cero, dependiendo del sistema de coordenadas que hayas elegido y de la dirección del movimiento. Un valor negativo simplemente indica que el objeto se encuentra en el lado negativo del origen de tu sistema de coordenadas.
¿Cómo se relaciona la ecuación de posición con la velocidad y la aceleración?
La velocidad es la tasa de cambio de la posición con respecto al tiempo. La aceleración es la tasa de cambio de la velocidad con respecto al tiempo. En términos de cálculo, la velocidad es la primera derivada de la posición, y la aceleración es la segunda derivada de la posición (o la primera derivada de la velocidad). La ecuación de posición se obtiene al integrar la ecuación de velocidad, y esta a su vez se obtiene al integrar la ecuación de aceleración.
¿Puedo usar estas ecuaciones para movimiento en dos o tres dimensiones?
Sí, las ecuaciones de posición que hemos visto son la base para analizar el movimiento en múltiples dimensiones. Simplemente se aplican por separado a cada componente (x, y, z) del movimiento. Por ejemplo, en el movimiento de proyectiles, se usan ecuaciones similares para la posición horizontal (MRU, si se desprecia la resistencia del aire) y la posición vertical (MRUA, debido a la gravedad).
La ecuación de posición es, sin duda, una de las piedras angulares de la física. Su comprensión no solo te permite resolver problemas de movimiento, sino que también te brinda una perspectiva más profunda sobre cómo funciona el universo a nivel fundamental. Desde la predicción de eclipses hasta el diseño de automóviles más seguros, el poder de estas fórmulas reside en su capacidad para describir y predecir la danza incesante de la materia en el tiempo y el espacio. Dominar la ecuación de posición es, en esencia, dominar el arte de predecir el futuro del movimiento.
Si quieres conocer otros artículos parecidos a La Ecuación de Posición: Desvelando el Movimiento puedes visitar la categoría Física.