10/03/2022
Los engranajes helicoidales representan una evolución significativa respecto a sus contrapartes de dientes rectos, ofreciendo un rendimiento superior en una multitud de aplicaciones. A diferencia de los engranajes cilíndricos rectos, cuyos dientes son paralelos al eje de rotación, los engranajes helicoidales presentan dientes cortados en un ángulo específico con respecto a dicho eje. Esta inclinación, conocida como ángulo de hélice, es la característica distintiva que les confiere sus notables ventajas, como un funcionamiento más suave y silencioso, una mayor capacidad de carga y la posibilidad de operar a velocidades periféricas considerablemente más altas.
La particular geometría de los dientes helicoidales permite que el contacto inicial entre ellos sea un punto, el cual se desarrolla progresivamente en una línea completa a medida que el engranaje rota. Este ciclo de contacto gradual contrasta con el contacto instantáneo de línea presente en los engranajes rectos, lo que resulta en una transmisión de potencia mucho más fluida, reduciendo vibraciones y ruido. Sin embargo, esta suavidad tiene una contrapartida: la generación de fuerzas de empuje axial, que deben ser gestionadas mediante rodamientos adecuados en el eje. Comprender cómo se calculan los parámetros fundamentales de estos componentes, especialmente el módulo, es crucial para su diseño y fabricación precisos.
- ¿Qué es un Engranaje Helicoidal?
- Ventajas y Desventajas de los Engranajes Helicoidales
- Parámetros Fundamentales de los Engranajes Helicoidales
- Cálculo del Módulo en Engranajes Helicoidales
- Cálculos de Resistencia y Durabilidad de Dientes de Engranajes Helicoidales
- Tipos Especiales de Engranajes Helicoidales
- Tabla Comparativa: Engranajes Rectos vs. Helicoidales
- Preguntas Frecuentes (FAQ)
- ¿Qué es el módulo en un engranaje helicoidal?
- ¿Por qué es importante el ángulo de hélice en los engranajes helicoidales?
- ¿Cuál es la diferencia entre el módulo normal y el módulo aparente/transversal?
- ¿Cómo afecta el módulo al tamaño del engranaje helicoidal?
- ¿Se pueden calcular engranajes helicoidales sin software especializado?
- ¿Qué es un engranaje de doble hélice o espina de pescado?
- Conclusión
¿Qué es un Engranaje Helicoidal?
Un engranaje helicoidal es un tipo de engranaje cilíndrico que se distingue por la forma de sus dientes, los cuales están inclinados en un ángulo con respecto al eje de rotación del engranaje. Esta inclinación puede ser hacia la derecha o hacia la izquierda, lo que define la "mano" del engranaje. Para que dos engranajes helicoidales de ejes paralelos puedan engranar correctamente, deben ser de mano opuesta (uno de hélice derecha y otro de hélice izquierda). Sin embargo, cuando se utilizan engranajes helicoidales cruzados para transmitir potencia entre ejes no paralelos y no intersecantes, no es necesario que sean de mano opuesta; de hecho, para un ángulo de eje de 90 grados, deben ser de la misma mano.
La principal ventaja de esta configuración de dientes es la mejora sustancial en la calidad del engrane. Mientras que en un engranaje recto el contacto entre los dientes ocurre a lo largo de una línea completa de golpe, en un engranaje helicoidal el contacto comienza en un punto y se extiende gradualmente a lo largo del diente. Esto distribuye la carga de manera más uniforme y progresiva, lo que se traduce en una reducción significativa del ruido y las vibraciones durante la operación. Esta característica permite que los engranajes helicoidales sean utilizados en aplicaciones que requieren alta precisión, velocidades elevadas y un funcionamiento silencioso, superando con creces las limitaciones de velocidad de los engranajes rectos (que generalmente no superan los 10 m/s, mientras que los helicoidales pueden exceder los 50 m/s si están bien mecanizados y equilibrados).
Además de la transmisión entre ejes paralelos, los engranajes helicoidales también pueden emplearse para conectar ejes que se cruzan en cualquier ángulo, hasta 90 grados. En estas configuraciones, conocidos como engranajes helicoidales cruzados, el contacto es menos óptimo, a menudo siendo poco más que un contacto puntual, aunque el rodaje puede mejorar ligeramente el área de contacto.
Ventajas y Desventajas de los Engranajes Helicoidales
La elección de un engranaje helicoidal sobre uno recto depende de las necesidades específicas de la aplicación. Es fundamental sopesar sus pros y contras.
Ventajas:
- Funcionamiento Suave y Silencioso: Gracias al contacto gradual de los dientes, la transmisión de potencia es mucho más fluida, lo que reduce el ruido y las vibraciones. Esto es crucial en aplicaciones donde el confort acústico es importante, como en transmisiones automotrices.
- Mayor Capacidad de Carga: La carga se distribuye sobre un área de contacto mayor y de forma más progresiva, permitiendo que los engranajes helicoidales transmitan mayores torques que los engranajes rectos de tamaño similar.
- Operación a Altas Velocidades: Su diseño permite trabajar a velocidades periféricas significativamente más altas sin generar excesivo ruido o desgaste.
- Mayor Durabilidad: La distribución uniforme de la carga contribuye a un menor desgaste de los dientes, prolongando la vida útil del engranaje.
Desventajas:
- Generación de Empuje Axial: La inclinación de los dientes provoca una componente de fuerza en la dirección del eje, lo que requiere el uso de rodamientos de empuje para soportar estas cargas. Esto añade complejidad y costo al diseño del conjunto.
- Mayor Complejidad de Fabricación: El tallado de los dientes helicoidales es más complejo y, por lo general, más costoso que el de los dientes rectos.
- Mayor Costo: Debido a la complejidad de fabricación y la necesidad de componentes adicionales (rodamientos de empuje), los engranajes helicoidales suelen ser más caros que los rectos.
- Posible Desalineación: Las fuerzas axiales pueden causar una ligera desalineación si los soportes no son lo suficientemente rígidos, lo que puede afectar el rendimiento.
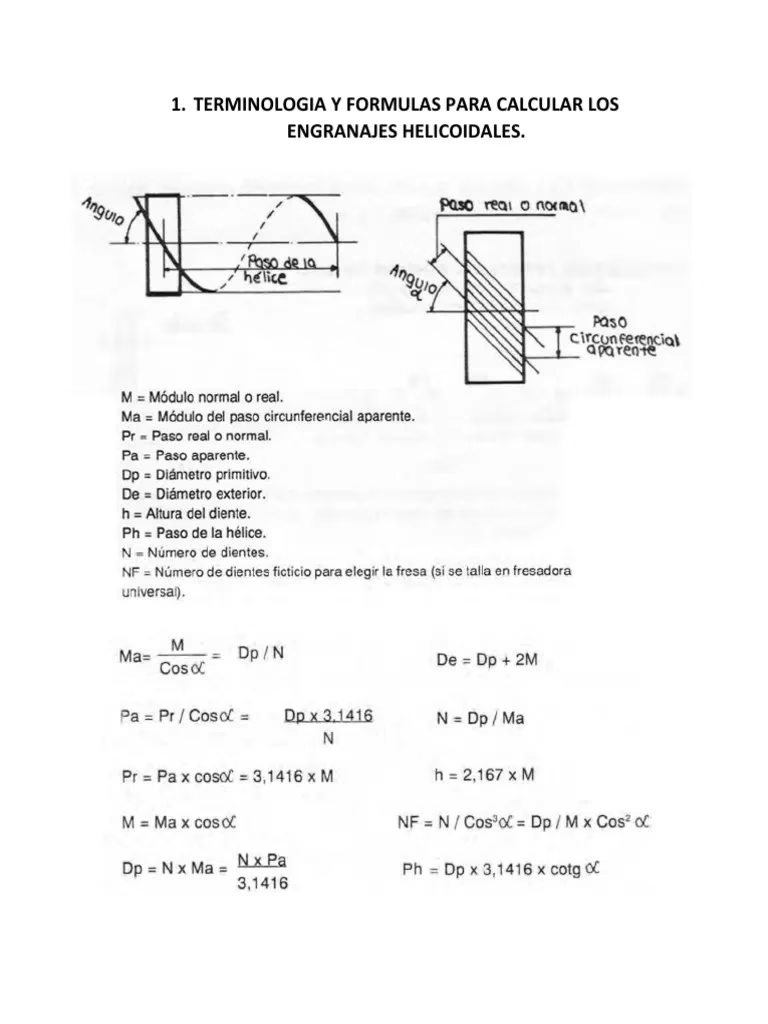
Parámetros Fundamentales de los Engranajes Helicoidales
Para el diseño y cálculo de un engranaje helicoidal, es esencial comprender una serie de parámetros geométricos clave. Estos parámetros definen la forma y el tamaño del diente, y cómo interactúan con su pareja.
- Ángulo de Hélice (β): Es el ángulo que forman los dientes con el eje de rotación del engranaje. Generalmente se selecciona en un rango de 6 a 20 grados para engranajes simples. Para engranajes de doble hélice o espina de pescado, pueden usarse ángulos mayores (25 a 40 grados) ya que el empuje axial se cancela mutuamente. Un ángulo mayor proporciona mayor suavidad de contacto y capacidad de velocidad, pero también aumenta el empuje axial.
- Paso Circular (p) / Módulo (m): Estos parámetros definen el tamaño del diente. En engranajes helicoidales, se distinguen dos tipos:
- Paso Circular Transversal (p): Medido a lo largo del círculo primitivo, es análogo al paso de los engranajes rectos.
- Paso Circular Normal (pn): Medido perpendicularmente a la hélice del diente. Es el paso real en la sección transversal del diente.
- Módulo Transversal (m): Relaciona el diámetro primitivo (d) con el número de dientes (z):
m = d / z. Este módulo se utiliza para los cálculos en el plano de rotación. - Módulo Normal (mn): Medido perpendicularmente a la hélice del diente. Es el módulo fundamental para el tamaño real del diente y la herramienta de corte. La relación entre el módulo transversal y el módulo normal es crucial:
m = mn / cosβomn = m ⋅ cosβ.
- Paso Axial (px): Es la distancia entre dos dientes consecutivos medida paralelamente al eje del engranaje. Se relaciona con el paso circular transversal y el ángulo de hélice:
px = p / tanβ. - Ángulo de Presión Normal (αn): Es el ángulo de presión en el plano normal a la hélice. Se relaciona con el ángulo de presión transversal (α) y el ángulo de hélice (β) mediante la fórmula:
αn = tan⁻¹(tanα ⋅ cosβ). - Diámetro Primitivo (d): Es el diámetro de la circunferencia sobre la cual se considera que los engranajes engranan sin deslizamiento. Se calcula como
d = z ⋅ m, donde 'm' es el módulo transversal. - Adendo (a): La altura del diente por encima del círculo primitivo. Generalmente,
a = m(módulo transversal). - Dedendo (af): La profundidad del diente por debajo del círculo primitivo. Generalmente,
af = 1.25 ⋅ m(módulo transversal). - Ancho de Cara (b): La longitud del diente a lo largo del eje del engranaje.
Cálculo del Módulo en Engranajes Helicoidales
El cálculo del módulo es el paso fundamental en el diseño de cualquier engranaje, y en el caso de los engranajes helicoidales, es vital entender la diferencia entre el Módulo Normal (mn) y el Módulo Aparente o Transversal (m).
El módulo normal (mn) es el módulo en el plano perpendicular al diente. Es el valor que se utiliza para seleccionar la herramienta de corte (fresa o fresadora) y es el que define el tamaño real del diente. Por otro lado, el módulo aparente o transversal (m) es el módulo en el plano de rotación del engranaje, y es el que se utiliza para calcular el diámetro primitivo y otras dimensiones en ese plano.
La relación entre ambos módulos está directamente ligada al ángulo de hélice (β):
m = mn / cosβ
Donde:
- m es el módulo aparente (o módulo transversal).
- mn es el módulo normal (o módulo real).
- cosβ es el coseno del ángulo de hélice.
Esta fórmula es la base para determinar el módulo aparente si se conoce el módulo normal (que es común en la fabricación) o viceversa, permitiendo la adaptación entre las especificaciones de diseño y las herramientas disponibles.
Ejemplo Práctico de Cálculo de Engranaje Helicoidal
Vamos a ilustrar los cálculos con un ejemplo concreto para un engranaje helicoidal métrico, utilizando los datos proporcionados:
- Número de dientes (N): 28
- Módulo Normal (Mr, que equivale a mn): 2.5 mm
- Ángulo de inclinación (α, que equivale a β): 17°30' (equivalente a 17.5 grados)
Procedemos con los cálculos:
1. Cálculo del Módulo Aparente (Ma o m):Ma = Mr / cosαMa = 2.5 / cos(17.5°)Ma = 2.5 / 0.95371695Ma ≈ 2.62 mm
Este es el módulo que se usaría para calcular el diámetro primitivo en el plano de rotación.
2. Cálculo del Diámetro Primitivo (Dp):Dp = Ma ⋅ NDp = 2.62 ⋅ 28Dp ≈ 73.36 mm (Usando el valor más preciso de Ma, 2.6212...)
3. Cálculo del Diámetro Exterior (De):
El diámetro exterior es el diámetro del engranaje completo.De = Dp + 2 ⋅ Mr (aquí Mr se refiere al módulo normal, que define el tamaño del adendo)De = 73.36 + 2 ⋅ 2.5De = 73.36 + 5De ≈ 78.36 mm
4. Cálculo de la Profundidad Total del Diente (H):H = 2.167 ⋅ MrH = 2.167 ⋅ 2.5H ≈ 5.42 mm
5. Cálculo del Número Virtual de Dientes (Ni o z'):
Este parámetro es importante para seleccionar la herramienta de corte adecuada, ya que la forma del diente helicoidal corresponde a la de un engranaje recto con este número virtual de dientes.Ni = N / (cosα)³Ni = 28 / (cos 17.5°)³Ni = 28 / (0.95371695)³Ni = 28 / 0.86747807Ni ≈ 32.2 ≈ 32 dientes
Esto significa que para tallar este engranaje, se utilizaría una fresa de módulo 2.5 (el módulo normal) y un número de fresa que corresponda a un engranaje recto de aproximadamente 32 dientes (generalmente una fresa número 5).
6. Cálculo del Paso de Hélice (Ph) o Avance de la Hélice:
Este es el avance de la hélice en una revolución completa del engranaje y es crucial para la configuración de la máquina fresadora.Ph = (Dp ⋅ π) / tanαPh = (73.36 ⋅ 3.14159) / tan(17.5°)Ph = 230.49 / 0.31529879Ph ≈ 731.02 mm
Estos cálculos proporcionan las dimensiones geométricas fundamentales necesarias para la fabricación del engranaje helicoidal.
Cálculos de Resistencia y Durabilidad de Dientes de Engranajes Helicoidales
Más allá de la geometría, el diseño de engranajes helicoidales también implica garantizar su capacidad para transmitir el torque requerido durante la vida útil deseada. Esto se logra evaluando la resistencia a la flexión de los dientes y su durabilidad (resistencia al picado o desgaste).
El diseño detallado de engranajes helicoidales se realiza típicamente siguiendo estándares internacionales como AGMA (American Gear Manufacturers Association) o ISO (International Organization for Standardization). Estas normas proporcionan métodos rigurosos y factores de calificación para asegurar un diseño robusto y fiable. Algunas de las normas relevantes incluyen:
- AGMA 2001-C95 o AGMA-2101-C95: Factores de calificación fundamentales y métodos de cálculo para dientes de engranajes rectos y helicoidales de evolvente.
- BS ISO 6336 (varias partes): Cálculo de la capacidad de carga de engranajes rectos y helicoidales, cubriendo principios básicos, resistencia a la fatiga superficial (picado) y resistencia a la flexión del diente.
Aunque los métodos precisos son complejos, a continuación, se mencionan las aproximaciones utilizadas para estimar la resistencia y durabilidad, útiles para primeras estimaciones o selección de engranajes estándar:
Resistencia a la Flexión (Fuerza de Bending)
La fórmula de Lewis, originalmente para engranajes rectos, puede adaptarse para engranajes helicoidales con algunas modificaciones. Esta fórmula proporciona una estimación conservadora de la resistencia del diente a la flexión:
σ = Kv ⋅ Fb / (ba ⋅ m ⋅ Y)
Donde:
- σ: Tensión de flexión del diente (MPa).
- Kv: Factor de velocidad, que compensa el impacto durante el engrane. Una aproximación es la ecuación de Barth para engranajes de perfil fresado:
Kv = (6.1 + V) / 6.1, donde V es la velocidad de la línea de paso. - Fb: Fuerza normal en el diente, relacionada con la fuerza tangencial (Ft) y el ángulo de hélice:
Fb = Ft / cosβ. - ba: Ancho de cara (mm).
- m: Módulo transversal (mm).
- Y: Factor de forma de Lewis, que debe determinarse para el número virtual de dientes (z'), calculado como
z' = z / cos³β.
La tensión de flexión resultante (σ) debe ser menor que la tensión de flexión admisible (Sb) para el material del engranaje. Este factor de forma Y se obtiene de tablas, como la siguiente para un ángulo de presión de 20 grados:
| Número de Dientes (Y) | Factor de Forma (Y) | Número de Dientes (Y) | Factor de Forma (Y) | Número de Dientes (Y) | Factor de Forma (Y) | Número de Dientes (Y) | Factor de Forma (Y) | Número de Dientes (Y) | Factor de Forma (Y) |
|---|---|---|---|---|---|---|---|---|---|
| 12 | 0.245 | 17 | 0.303 | 22 | 0.331 | 34 | 0.371 | 75 | 0.435 |
| 13 | 0.261 | 18 | 0.309 | 24 | 0.337 | 38 | 0.384 | 100 | 0.447 |
| 14 | 0.277 | 19 | 0.314 | 26 | 0.346 | 45 | 0.401 | 150 | 0.460 |
| 15 | 0.290 | 20 | 0.322 | 28 | 0.353 | 50 | 0.409 | 300 | 0.472 |
| 16 | 0.296 | 21 | 0.328 | 30 | 0.359 | 60 | 0.422 | Cremallera | 0.485 |
Resistencia Superficial (Durabilidad)
La durabilidad de la superficie del diente se refiere a su resistencia al picado, es decir, a la formación de pequeñas cavidades debido a la fatiga por contacto. La carga admisible por durabilidad superficial (Fw) se puede estimar aproximadamente con la siguiente ecuación:
Fw = Kv ⋅ dp ⋅ ba ⋅ Q ⋅ K / cos²β
Donde:
- Fw: Carga admisible del engranaje (MPa).
- Kv: Factor de velocidad (el mismo que en la flexión).
- dp: Diámetro primitivo del piñón (mm).
- ba: Ancho de cara (mm).
- Q: Factor de relación de velocidad, calculado como
Q = 2 ⋅ dg / (dp + dg) = 2 ⋅ zg / (zp + zp). - K: Factor de carga de desgaste del engranaje (MPa), obtenido de tablas de propiedades de materiales.
Es importante recalcar que estas fórmulas son simplificaciones y para un diseño crítico, siempre se deben consultar las normas de diseño de engranajes o utilizar software especializado que implemente dichos estándares.
Tipos Especiales de Engranajes Helicoidales
Engranajes Helicoidales Cruzados
Cuando dos engranajes helicoidales se utilizan para transmitir potencia entre ejes no paralelos y no intersecantes, se les denomina engranajes helicoidales cruzados. Son, en esencia, engranajes helicoidales normales que operan con ejes no paralelos. Para un funcionamiento exitoso, deben tener el mismo ángulo de presión y el mismo paso normal. Sin embargo, no es necesario que tengan el mismo ángulo de hélice ni que sean de mano opuesta. De hecho, para ejes cruzados a 90 grados, los engranajes deben ser de la misma mano.
El contacto en los engranajes helicoidales cruzados no es una línea de contacto tan buena como en los engranajes helicoidales de ejes paralelos; a menudo es poco más que un contacto puntual. El deslizamiento es significativo, lo que requiere una lubricación adecuada y puede generar más calor. La distancia entre centros (a) se calcula como: a = m ⋅ [(z1 / cosβ1) + (z2 / cosβ2)] / 2. La velocidad de deslizamiento (Vs) se da por: Vs = (V1 / cosβ1) = (V2 / cosβ2).
Engranajes de Doble Hélice o Espina de Pescado
Los engranajes de doble hélice, a menudo llamados engranajes de "espina de pescado" debido a su apariencia, son esencialmente dos engranajes helicoidales de mano opuesta unidos lado a lado en el mismo eje. La principal ventaja de esta configuración es que las fuerzas de empuje axial generadas por una hélice son compensadas por las fuerzas opuestas generadas por la otra hélice. Esto elimina la necesidad de rodamientos de empuje externos y permite el uso de ángulos de hélice mucho mayores (como 25 a 40 grados) sin la penalización de cargas axiales elevadas. Son ideales para aplicaciones que requieren una transmisión de potencia muy suave, silenciosa y eficiente, a menudo encontradas en cajas de engranajes de alta potencia y turbinas.
Tabla Comparativa: Engranajes Rectos vs. Helicoidales
| Característica | Engranajes Rectos | Engranajes Helicoidales |
|---|---|---|
| Geometría del Diente | Paralelos al eje de rotación | Inclinados respecto al eje de rotación |
| Contacto de Dientes | Contacto inicial de línea completa | Contacto inicial de punto, progresando a línea |
| Suavidad de Operación | Menor; más propensos a vibraciones | Mayor; funcionamiento muy suave |
| Nivel de Ruido | Más ruidosos, especialmente a altas velocidades | Significativamente más silenciosos |
| Velocidad Periférica Máx. | Generalmente hasta 10 m/s | Pueden exceder los 50 m/s |
| Capacidad de Carga | Menor para un tamaño dado | Mayor debido a la distribución de carga |
| Fuerzas Axiales (Empuje) | No generan empuje axial | Generan empuje axial (excepto doble hélice) |
| Complejidad de Fabricación | Menor; más fáciles de producir | Mayor; requieren maquinaria y procesos más complejos |
| Costo | Generalmente más económicos | Generalmente más caros |
| Aplicaciones Típicas | Bombas, transmisiones simples, baja velocidad | Transmisiones automotrices, cajas de engranajes industriales, alta velocidad y potencia |
Preguntas Frecuentes (FAQ)
¿Qué es el módulo en un engranaje helicoidal?
El módulo en un engranaje helicoidal es una medida que define el tamaño de los dientes. Se distingue entre el módulo normal (mn), que es el tamaño real del diente en la sección perpendicular a la hélice y se usa para la selección de la herramienta de corte, y el módulo aparente o transversal (m), que se utiliza para los cálculos en el plano de rotación del engranaje y para determinar el diámetro primitivo. La relación entre ellos es clave: el módulo aparente es igual al módulo normal dividido por el coseno del ángulo de hélice (m = mn / cosβ).
¿Por qué es importante el ángulo de hélice en los engranajes helicoidales?
El ángulo de hélice es fundamental porque determina la suavidad del engrane, la capacidad de carga y la magnitud del empuje axial generado. Un ángulo mayor generalmente resulta en un funcionamiento más suave y una mayor capacidad de velocidad, pero también incrementa el empuje axial, lo que requiere rodamientos de empuje más robustos. En engranajes de doble hélice, ángulos mayores son posibles porque el empuje se cancela.
¿Cuál es la diferencia entre el módulo normal y el módulo aparente/transversal?
El módulo normal (mn) es el tamaño del diente medido perpendicularmente a la hélice, es el módulo "real" del diente y el que se usa para elegir la herramienta de corte. El módulo aparente o transversal (m) es el tamaño del diente proyectado en el plano de rotación del engranaje, y es el que se utiliza para calcular el diámetro primitivo y las distancias entre centros. La relación entre ellos es m = mn / cosβ.
¿Cómo afecta el módulo al tamaño del engranaje helicoidal?
El módulo es directamente proporcional al tamaño de los dientes y, por extensión, al diámetro primitivo del engranaje (d = z ⋅ m). Un módulo más grande significa dientes más grandes y, por lo tanto, un engranaje de mayor tamaño para el mismo número de dientes. Esto también implica una mayor capacidad de carga y resistencia, pero también mayor espacio requerido y, a menudo, mayores costos de material y fabricación.
¿Se pueden calcular engranajes helicoidales sin software especializado?
Sí, es posible calcular los parámetros geométricos y realizar estimaciones de resistencia de engranajes helicoidales utilizando fórmulas manuales, como se ha demostrado en este artículo. Sin embargo, para diseños detallados, optimización, y análisis de tensiones y durabilidad precisos, especialmente en aplicaciones críticas, es altamente recomendable el uso de software especializado que implemente los estándares de diseño de engranajes (como AGMA o ISO). Estos programas simplifican enormemente el proceso y minimizan los errores.
¿Qué es un engranaje de doble hélice o espina de pescado?
Un engranaje de doble hélice, también conocido como engranaje de espina de pescado, es un tipo de engranaje helicoidal que incorpora dos conjuntos de dientes helicoidales opuestos en la misma cara del engranaje. La principal ventaja de esta configuración es que las fuerzas de empuje axial generadas por una hélice son equilibradas y canceladas por las fuerzas de la hélice opuesta, eliminando la necesidad de rodamientos de empuje y permitiendo un funcionamiento extremadamente suave y silencioso.
Conclusión
Los engranajes helicoidales son componentes de transmisión de potencia extraordinariamente versátiles y eficientes, capaces de manejar altas velocidades y cargas con una suavidad y un silencio inigualables en comparación con los engranajes rectos. La clave para su diseño y fabricación radica en una comprensión profunda de sus parámetros geométricos, particularmente el concepto de módulo normal y módulo aparente, y la influencia del ángulo de hélice. Aunque el cálculo manual proporciona una base sólida, la complejidad inherente al diseño de engranajes de alto rendimiento a menudo exige el uso de estándares industriales y herramientas de software avanzadas para garantizar la fiabilidad y la durabilidad. Al dominar estos principios, se abre la puerta a la creación de sistemas de transmisión más robustos, eficientes y silenciosos, fundamentales en la ingeniería moderna.
Si quieres conocer otros artículos parecidos a Calculando el Módulo de Engranajes Helicoidales puedes visitar la categoría Cálculos.