19/03/2024
En el fascinante mundo de la física y la ingeniería, comprender el movimiento de los objetos es fundamental. Sin embargo, no basta con saber si algo se mueve, sino cómo cambia su velocidad. Es aquí donde entra en juego la aceleración, una magnitud vectorial que nos indica no solo cuánto cambia la velocidad, sino también en qué dirección. Pero, ¿qué pasa si solo nos interesa la intensidad de ese cambio, sin importar la dirección específica? Para eso, necesitamos calcular la magnitud de la aceleración, una medida escalar que representa la "cantidad" total de aceleración. Este artículo te guiará paso a paso para que domines este cálculo esencial, desde sus fundamentos teóricos hasta ejemplos prácticos en dos y tres dimensiones.
- ¿Qué es la Aceleración y Por Qué es un Vector?
- Comprendiendo los Componentes de un Vector de Aceleración
- El Teorema de Pitágoras: La Clave de la Magnitud
- Cálculo de la Magnitud en Dos Dimensiones (2D)
- Cálculo de la Magnitud en Tres Dimensiones (3D)
- Unidades de la Aceleración y Consistencia
- ¿Por Qué es Crucial Calcular la Magnitud de la Aceleración?
- Preguntas Frecuentes (FAQs)
- ¿La magnitud de la aceleración puede ser negativa?
- ¿Cuál es la diferencia entre aceleración y velocidad?
- ¿Necesito la dirección del vector de aceleración para calcular su magnitud?
- ¿Qué pasa si una o más componentes de la aceleración son cero?
- ¿Cómo se relaciona la magnitud de la aceleración con la fuerza?
¿Qué es la Aceleración y Por Qué es un Vector?
Antes de sumergirnos en el cálculo de su magnitud, es crucial entender qué es la aceleración. En términos simples, la aceleración es la tasa de cambio de la velocidad de un objeto con respecto al tiempo. Se mide en unidades de longitud por tiempo al cuadrado, como metros por segundo al cuadrado (m/s²).
La velocidad, a diferencia de la rapidez, es una magnitud vectorial, lo que significa que tiene tanto magnitud (la rapidez) como dirección. Dado que la aceleración es el cambio de esta velocidad, hereda su naturaleza vectorial. Esto implica que un objeto puede acelerar de tres maneras:
- Cambiando su rapidez (aumentando o disminuyendo).
- Cambiando su dirección de movimiento.
- Cambiando ambas cosas simultáneamente.
Por ejemplo, un coche que acelera en línea recta está cambiando su rapidez. Un coche que toma una curva a velocidad constante también está acelerando, porque su dirección de movimiento está cambiando. La representación vectorial nos permite capturar toda esta información. Sin embargo, en muchas aplicaciones, la dirección es menos relevante que la intensidad del cambio, es decir, la magnitud de la aceleración.
Comprendiendo los Componentes de un Vector de Aceleración
Para calcular la magnitud de un vector, primero debemos entender cómo se descompone. Un vector de aceleración, como cualquier vector, puede ser descompuesto en sus componentes rectangulares a lo largo de los ejes de un sistema de coordenadas (comúnmente x, y, y z). Estas componentes representan la aceleración que ocurre específicamente a lo largo de cada uno de esos ejes.
- En dos dimensiones (2D): Un vector de aceleración
ase puede expresar comoa = (a_x, a_y), dondea_xes la componente de la aceleración en la dirección horizontal (eje X) ya_yes la componente en la dirección vertical (eje Y). - En tres dimensiones (3D): Un vector de aceleración
ase expresa comoa = (a_x, a_y, a_z), añadiendoa_zpara la componente en la dirección de profundidad (eje Z).
Estas componentes son cruciales porque nos permiten aplicar una de las herramientas matemáticas más fundamentales: el Teorema de Pitágoras.
El Teorema de Pitágoras: La Clave de la Magnitud
El Teorema de Pitágoras, que todos recordamos de la geometría, establece que en un triángulo rectángulo, el cuadrado de la hipotenusa (el lado opuesto al ángulo recto) es igual a la suma de los cuadrados de los otros dos lados (los catetos). Matemáticamente, c² = a² + b², o c = sqrt(a² + b²).
¿Cómo se aplica esto a los vectores? Imagina que las componentes a_x y a_y de un vector de aceleración en 2D forman los catetos de un triángulo rectángulo, y la magnitud del vector es la hipotenusa. Por lo tanto, la fórmula para la magnitud de la aceleración |a| (a menudo denotada con barras verticales para indicar magnitud) es una extensión directa de este teorema.
Cálculo de la Magnitud en Dos Dimensiones (2D)
Cuando un objeto se mueve en un plano (como una mesa o el suelo), su aceleración puede tener componentes en dos direcciones perpendiculares. Para calcular la magnitud de su aceleración total, utilizamos la siguiente fórmula, derivada directamente del Teorema de Pitágoras:
|a| = sqrt(a_x² + a_y²)
Donde:
|a|es la magnitud de la aceleración.a_xes la componente de la aceleración en la dirección X.a_yes la componente de la aceleración en la dirección Y.
Ejemplo Práctico en 2D:
Imagina un cohete de juguete que acelera horizontalmente a 3 m/s² y verticalmente a 4 m/s². ¿Cuál es la magnitud de su aceleración total?
- Identifica las componentes:
a_x = 3 m/s²ya_y = 4 m/s². - Eleva al cuadrado cada componente:
a_x² = 3² = 9ya_y² = 4² = 16. - Suma los cuadrados:
9 + 16 = 25. - Calcula la raíz cuadrada del resultado:
sqrt(25) = 5.
Por lo tanto, la magnitud de la aceleración del cohete es de 5 m/s². Es importante notar que la magnitud siempre será un valor no negativo.
Tabla Comparativa de Ejemplos en 2D:
Aquí tienes algunos ejemplos adicionales para solidificar tu comprensión:
| Componente a_x (m/s²) | Componente a_y (m/s²) | Magnitud |a| (m/s²) |
|---|---|---|
| 3 | 4 | 5 |
| -5 | 0 | 5 |
| 2 | -7 | sqrt(2² + (-7)²) = sqrt(4 + 49) = sqrt(53) ≈ 7.28 |
| 0 | 6 | 6 |
Cálculo de la Magnitud en Tres Dimensiones (3D)
En el mundo real, los objetos a menudo se mueven en un espacio tridimensional. Esto significa que la aceleración puede tener componentes en las direcciones X, Y y Z. La buena noticia es que el principio es exactamente el mismo; simplemente extendemos el Teorema de Pitágoras a una dimensión adicional.
|a| = sqrt(a_x² + a_y² + a_z²)
Donde:
|a|es la magnitud de la aceleración.a_xes la componente de la aceleración en la dirección X.a_yes la componente de la aceleración en la dirección Y.a_zes la componente de la aceleración en la dirección Z.
Ejemplo Práctico en 3D:
Considera un dron que experimenta una aceleración de a_x = 1 m/s², a_y = 2 m/s² y a_z = 2 m/s². ¿Cuál es la magnitud de su aceleración total?
- Identifica las componentes:
a_x = 1,a_y = 2,a_z = 2. - Eleva al cuadrado cada componente:
a_x² = 1² = 1,a_y² = 2² = 4,a_z² = 2² = 4. - Suma los cuadrados:
1 + 4 + 4 = 9. - Calcula la raíz cuadrada del resultado:
sqrt(9) = 3.
La magnitud de la aceleración del dron es de 3 m/s².
Tabla Comparativa de Ejemplos en 3D:
| Componente a_x (m/s²) | Componente a_y (m/s²) | Componente a_z (m/s²) | Magnitud |a| (m/s²) |
|---|---|---|---|
| 1 | 2 | 2 | 3 |
| -3 | 4 | 0 | sqrt((-3)² + 4² + 0²) = sqrt(9 + 16) = sqrt(25) = 5 |
| 6 | -2 | 3 | sqrt(6² + (-2)² + 3²) = sqrt(36 + 4 + 9) = sqrt(49) = 7 |
Unidades de la Aceleración y Consistencia
La unidad estándar de la aceleración en el Sistema Internacional (SI) es el metro por segundo al cuadrado (m/s²). Sin embargo, también puedes encontrar otras unidades, como kilómetros por hora al cuadrado (km/h²), o incluso g's (donde 1g es la aceleración debida a la gravedad en la superficie de la Tierra, aproximadamente 9.81 m/s²). Es fundamental que, al realizar los cálculos, todas las componentes de la aceleración estén en las mismas unidades para obtener un resultado coherente. Si tienes componentes en diferentes unidades, deberás convertirlas antes de aplicar la fórmula.
¿Por Qué es Crucial Calcular la Magnitud de la Aceleración?
Aunque la dirección de un vector de aceleración es importante para una descripción completa del movimiento, su magnitud tiene una relevancia práctica inmensa en diversas áreas:
- Ingeniería Automotriz: Al diseñar vehículos, los ingenieros calculan la magnitud de la aceleración máxima que un coche puede alcanzar o soportar, lo que es vital para el rendimiento y la seguridad. Esto incluye pruebas de impacto donde se mide la aceleración (o desaceleración) experimentada por los ocupantes.
- Diseño de Montañas Rusas: Para crear experiencias emocionantes pero seguras, los diseñadores de montañas rusas calculan cuidadosamente la magnitud de la aceleración en diferentes puntos del recorrido, asegurándose de que no exceda los límites de tolerancia del cuerpo humano.
- Aeroespacial: En el lanzamiento de cohetes o el vuelo de aviones, la magnitud de la aceleración es clave para determinar las fuerzas que actúan sobre la estructura y la tripulación, así como para calcular las trayectorias.
- Biomecánica y Deportes: Los atletas y entrenadores utilizan el análisis de la aceleración para optimizar el rendimiento. Por ejemplo, la magnitud de la aceleración en un sprint o un salto puede indicar la potencia generada por un atleta.
- Sismología: Los sismógrafos miden las componentes de la aceleración del suelo durante un terremoto. La magnitud de esta aceleración es un factor crítico para evaluar el daño potencial a las estructuras.
En todos estos campos, la magnitud proporciona un valor escalar que permite comparar la intensidad del cambio de velocidad de manera universal, sin preocuparse por la orientación específica.
Preguntas Frecuentes (FAQs)
¿La magnitud de la aceleración puede ser negativa?
No, la magnitud de un vector es siempre un valor no negativo (cero o positivo). Esto se debe a que representa la "longitud" o "intensidad" del vector. Aunque las componentes individuales (a_x, a_y, a_z) pueden ser negativas (indicando una dirección opuesta al eje positivo), al elevarlas al cuadrado, se vuelven positivas, y la raíz cuadrada final siempre es positiva.
¿Cuál es la diferencia entre aceleración y velocidad?
La velocidad es la tasa de cambio de la posición de un objeto y es un vector (tiene magnitud y dirección). La aceleración, por otro lado, es la tasa de cambio de la velocidad, también un vector. En resumen, la velocidad te dice qué tan rápido y en qué dirección se mueve algo; la aceleración te dice qué tan rápido y en qué dirección cambia esa velocidad.
¿Necesito la dirección del vector de aceleración para calcular su magnitud?
No directamente. Para calcular la magnitud, necesitas las componentes del vector de aceleración a lo largo de los ejes de coordenadas (a_x, a_y, a_z). La dirección del vector completo se determina a partir de la relación entre estas componentes, pero no es un dato de entrada para la fórmula de la magnitud.
¿Qué pasa si una o más componentes de la aceleración son cero?
Si una o más componentes son cero, simplemente las incluyes como cero en la fórmula. Por ejemplo, si un objeto solo acelera en la dirección X (a_y = 0, a_z = 0), la fórmula 3D se simplifica a |a| = sqrt(a_x² + 0² + 0²) = sqrt(a_x²) = |a_x|. En este caso, la magnitud es simplemente el valor absoluto de la componente no nula.
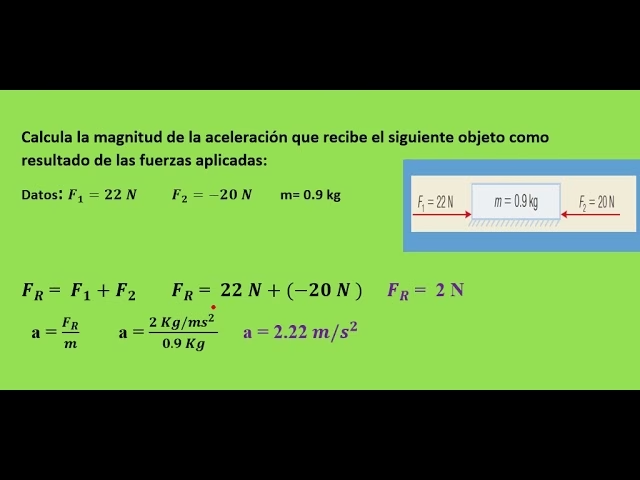
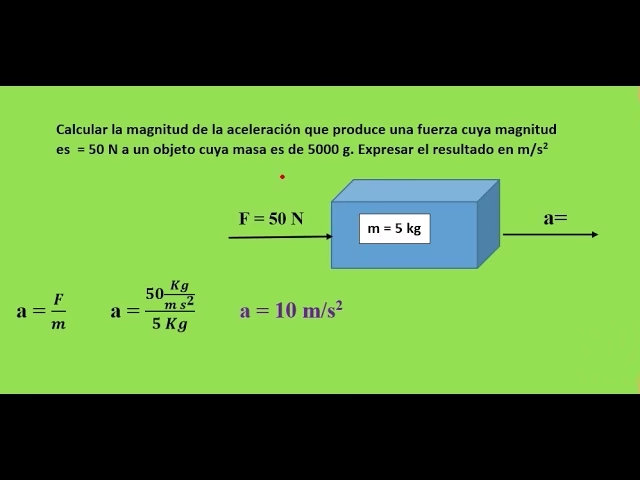
¿Cómo se relaciona la magnitud de la aceleración con la fuerza?
La magnitud de la aceleración está directamente relacionada con la fuerza a través de la Segunda Ley de Newton, que establece que la fuerza neta (F) que actúa sobre un objeto es igual a su masa (m) multiplicada por su aceleración (a): F = m * a. Si nos referimos a las magnitudes, entonces la magnitud de la fuerza neta es igual a la masa multiplicada por la magnitud de la aceleración: |F| = m * |a|. Esto es fundamental para entender cómo las fuerzas causan cambios en el movimiento.
Calcular la magnitud de los vectores de aceleración es una habilidad fundamental en física, ingeniería y muchas otras disciplinas científicas. Como hemos visto, el proceso es sencillo y se basa en el Teorema de Pitágoras, aplicable tanto en dos como en tres dimensiones. Al dominar este cálculo, no solo entenderás mejor cómo se cuantifica la "fuerza" del cambio de velocidad, sino que también podrás aplicar este conocimiento para resolver problemas del mundo real, desde el diseño de vehículos hasta el análisis del rendimiento deportivo. Recuerda siempre la importancia de la consistencia en las unidades y de interpretar la magnitud como una medida siempre positiva de la intensidad de la aceleración. Con esta guía, tienes las herramientas necesarias para abordar cualquier problema que involucre la magnitud de la aceleración.
Si quieres conocer otros artículos parecidos a Dominando el Cálculo de la Magnitud de Aceleración puedes visitar la categoría Física.