16/03/2022
En el vasto universo de la ingeniería eléctrica, los motores juegan un papel fundamental en innumerables aplicaciones, desde la industria pesada hasta los electrodomésticos más cotidianos. Entre la diversidad de motores disponibles en el mercado, los motores asíncronos, también conocidos como motores de inducción, destacan por su robustez, fiabilidad y eficiencia. Dentro de esta categoría, los motores de 4 polos son particularmente relevantes y ampliamente utilizados, gracias a sus características específicas que los hacen ideales para ciertas tareas. Comprender su funcionamiento, y especialmente su velocidad, es crucial para ingenieros, técnicos y cualquier entusiasta que desee optimizar sistemas que dependan de ellos. Este artículo se adentrará en el corazón de los motores asíncronos de 4 polos, desglosando su velocidad, sus componentes clave y los factores que la influyen, así como sus principales beneficios y aplicaciones.
- ¿Qué es un Motor Asíncrono de 4 Polos y Por Qué es Especial?
- Componentes Clave y su Influencia en el Funcionamiento del Motor de 4 Polos
- La Velocidad de un Motor Asíncrono de 4 Polos: Sincronismo y Deslizamiento
- Impacto de la Frecuencia en la Velocidad del Motor
- Control de Velocidad: El Panel VFD
- Rendimiento y Eficiencia en Motores Asíncronos
- Tabla Comparativa: Motor de 2 Polos vs. Motor de 4 Polos
- Preguntas Frecuentes (FAQs)
- Conclusión
¿Qué es un Motor Asíncrono de 4 Polos y Por Qué es Especial?
Un motor asíncrono de 4 polos es, en esencia, un motor eléctrico de corriente alterna (CA) que cuenta con cuatro polos magnéticos por fase en su estator. Esta configuración significa que el estator tiene dos pares de polos, lo que influye directamente en la velocidad de rotación del campo magnético y, por ende, en la velocidad del rotor. La presencia de cuatro polos implica un diseño donde dos conjuntos de devanados están energizados con un desfase de 120 grados eléctricos entre sí, creando un campo magnético giratorio.
Este diseño específico confiere al motor de 4 polos varias ventajas significativas que lo distinguen de otras configuraciones, como los motores de 2 polos. Entre sus beneficios más destacados se incluyen:
- Mayor torque a bajas velocidades: Su configuración permite generar un par motor considerable incluso a velocidades de rotación más bajas, lo que es vital para aplicaciones que requieren fuerza de arranque o mover cargas pesadas sin sacrificar el control.
- Regulación de velocidad mejorada: Ofrecen una respuesta más estable ante cambios de carga, manteniendo una velocidad de operación consistente.
- Operación eficiente y silenciosa: Tienden a ser más silenciosos en comparación con motores de menos polos y su diseño favorece una alta eficiencia energética.
- Bajos niveles de vibración: La distribución de los polos contribuye a un funcionamiento más suave y con menos vibraciones, lo que prolonga la vida útil del motor y de los equipos asociados.
Debido a estas características, los motores de 4 polos son frecuentemente la elección predilecta en aplicaciones donde se requiere un alto nivel de torque a velocidades relativamente bajas, tales como ventiladores industriales, bombas hidráulicas, compresores de aire y diversas máquinas herramientas.
Componentes Clave y su Influencia en el Funcionamiento del Motor de 4 Polos
Para comprender a fondo la velocidad y el rendimiento de un motor de 4 polos, es fundamental conocer sus componentes y cómo interactúan:
- Polos Magnéticos: Como su nombre indica, la característica principal son sus cuatro polos magnéticos. Estos polos son los puntos en el estator donde se concentra el flujo magnético. La forma en que estos polos se organizan (norte-sur-norte-sur) es fundamental para la creación del campo magnético giratorio que induce la corriente en el rotor y lo hace girar.
- Revoluciones Por Minuto (RPM): Las RPM representan el número de veces que el motor completa una rotación en un minuto. La velocidad síncrona de un motor (la velocidad del campo magnético giratorio) está directamente relacionada con el número de polos y la frecuencia de la fuente de alimentación. Para un motor de 4 polos, la velocidad síncrona es significativamente menor que la de un motor de 2 polos. Por ejemplo, con una frecuencia de alimentación de 60 Hz, un motor de 4 polos idealmente alcanzaría unas 1800 RPM síncronas, mientras que uno de 2 polos alcanzaría 3600 RPM. Si la frecuencia es de 50 Hz, la velocidad síncrona de un motor de 4 polos sería de aproximadamente 1500 RPM.
- Configuración: La disposición norte-sur-norte-sur de los polos contribuye a que estos motores sean generalmente menos ruidosos que otros diseños, especialmente los motores cilíndricos.
- Número de Ciclos: Un motor de 4 polos, al ser más grande en capacidad y tener más polos que un motor de 2 polos, realiza el doble de trabajo por ciclo de fuente en términos de inducción de campo magnético. Completa la mitad de un ciclo mecánico por cada ciclo eléctrico de la fuente.
La Velocidad de un Motor Asíncrono de 4 Polos: Sincronismo y Deslizamiento
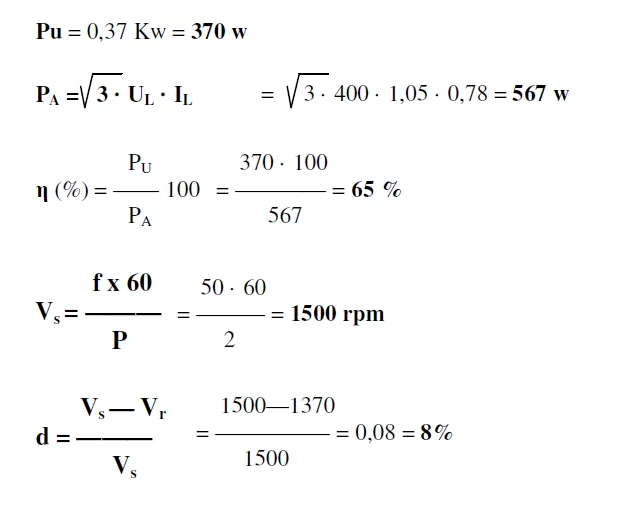
La velocidad de un motor asíncrono se entiende mejor distinguiendo entre su velocidad síncrona y su velocidad real de funcionamiento. La velocidad síncrona (Ns) es la velocidad a la que gira el campo magnético del estator y se calcula con la siguiente fórmula:
Ns = (120 * f) / P
Donde:
- Ns = Velocidad síncrona en RPM
- f = Frecuencia de la fuente de alimentación en Hertz (Hz)
- P = Número de polos del motor
Para un motor de 4 polos, las velocidades síncronas típicas son:
- Con una frecuencia de 60 Hz: Ns = (120 * 60) / 4 = 7200 / 4 = 1800 RPM
- Con una frecuencia de 50 Hz: Ns = (120 * 50) / 4 = 6000 / 4 = 1500 RPM
Es importante destacar que estas son velocidades teóricas del campo magnético. El rotor de un motor asíncrono nunca gira exactamente a la velocidad síncrona. Siempre hay una ligera diferencia, conocida como deslizamiento (slip). El deslizamiento es la diferencia entre la velocidad síncrona del campo magnético del estator y la velocidad real del rotor. Este deslizamiento es esencial para el funcionamiento del motor, ya que es lo que induce la corriente en el rotor y genera el torque. Sin deslizamiento, no habría inducción y, por lo tanto, no habría fuerza motriz.
El deslizamiento se expresa generalmente como un porcentaje y típicamente varía entre el 0.5% y el 5% de la velocidad síncrona. Por ejemplo, un motor de 4 polos con una velocidad síncrona de 1800 RPM y un deslizamiento del 4% tendría una velocidad real de rotación de aproximadamente 1728 RPM (1800 - (1800 * 0.04)). Un ejemplo práctico es un motor Baldor de 4 polos, cuya velocidad real del eje podría ser de 1725 RPM, lo que confirma la presencia de un deslizamiento.
Impacto de la Frecuencia en la Velocidad del Motor
La frecuencia de la red eléctrica es un factor determinante en la velocidad síncrona de un motor asíncrono. Como se vio en la fórmula, una mayor frecuencia resulta en una mayor velocidad síncrona. Esto explica por qué los motores diseñados para redes de 60 Hz (comunes en América del Norte) operan a velocidades síncronas más altas que los diseñados para 50 Hz (comunes en Europa y otras partes del mundo), asumiendo el mismo número de polos. Esta relación directa es crucial para el diseño y la selección de motores para aplicaciones específicas en diferentes regiones geográficas.
Control de Velocidad: El Panel VFD
Aunque la velocidad nominal de un motor de 4 polos está determinada por su diseño y la frecuencia de la red, en muchas aplicaciones es necesario variar esta velocidad para adaptarse a diferentes condiciones de operación o requisitos de proceso. Aquí es donde entra en juego el panel VFD (Variador de Frecuencia o Variador de Velocidad). Un VFD es un dispositivo electrónico que controla la velocidad de un motor eléctrico variando la frecuencia y el voltaje de la energía suministrada al motor.
El uso de un VFD con un motor de 4 polos ofrece una flexibilidad considerable, permitiendo ajustar la velocidad del motor de manera precisa para optimizar el rendimiento de la aplicación, ahorrar energía y reducir el desgaste mecánico. Por ejemplo, en bombas y ventiladores, la capacidad de controlar la velocidad permite ajustar el flujo o la presión según la demanda, lo que resulta en una operación mucho más eficiente que un sistema de encendido/apagado o con válvulas de estrangulación.
Rendimiento y Eficiencia en Motores Asíncronos
El rendimiento de los motores asíncronos o de inducción es un aspecto crítico, especialmente en el contexto de la eficiencia energética. A grandes rasgos, el rendimiento de estos motores varía típicamente entre el 75% y el 95%. Esta variación depende de varios factores:
- Potencia del Motor: Generalmente, los motores de mayor potencia tienden a tener una eficiencia más alta. Un motor de 100 HP será intrínsecamente más eficiente que uno de 1 HP, debido a las pérdidas relativas por efecto Joule y otras pérdidas.
- Tipo de Construcción: La calidad de los materiales, el diseño del núcleo magnético, el tipo de devanado y la precisión de la fabricación influyen directamente en las pérdidas del motor y, por ende, en su eficiencia. Los motores de alta eficiencia (Premium Efficiency, IE3 o IE4) están diseñados con materiales y técnicas que minimizan estas pérdidas.
- Carga de Operación: Los motores asíncronos son más eficientes cuando operan cerca de su carga nominal. Un motor que trabaja constantemente con una carga muy baja (subcargado) o muy alta (sobrecargado) experimentará una disminución en su eficiencia.
- Mantenimiento: Un motor bien mantenido, con rodamientos lubricados adecuadamente y buena ventilación, operará de manera más eficiente que uno descuidado.
La búsqueda de la máxima eficiencia es una constante en la industria, no solo por el ahorro de energía y costos operativos, sino también por la reducción de la huella de carbono. Los motores de 4 polos, por su diseño inherente, a menudo ofrecen un buen punto de partida en términos de eficiencia, especialmente cuando se combinan con un control de velocidad adecuado mediante un VFD.
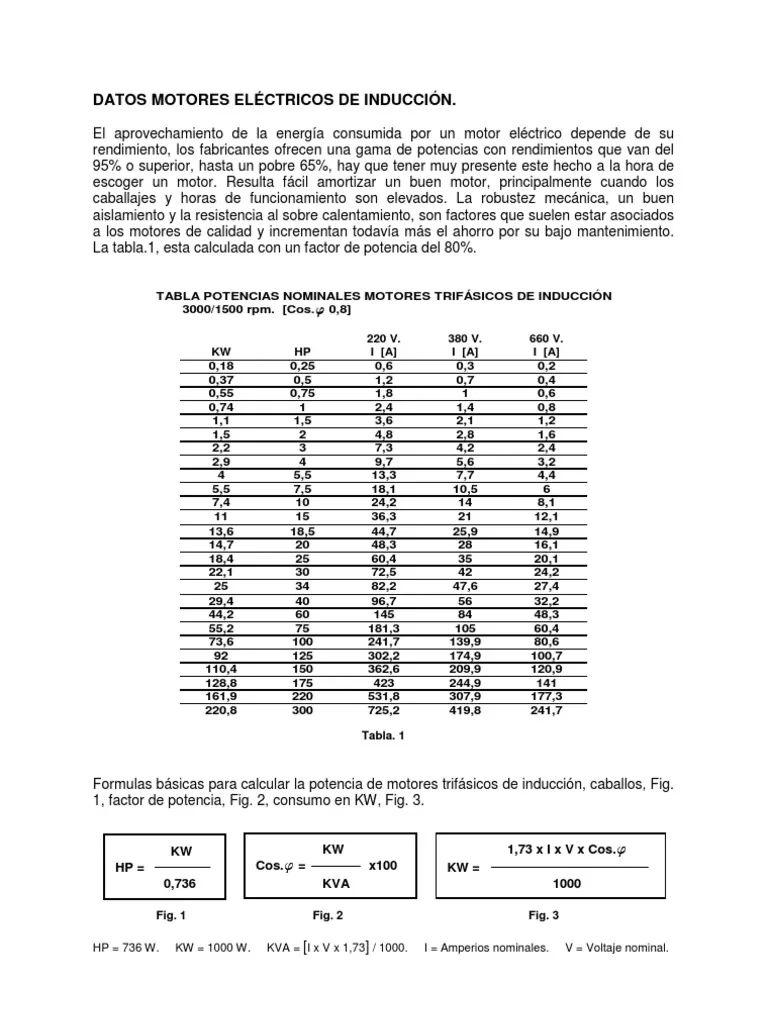
Tabla Comparativa: Motor de 2 Polos vs. Motor de 4 Polos
| Característica | Motor de 2 Polos | Motor de 4 Polos |
|---|---|---|
| Número de Polos | 2 | 4 |
| Velocidad Síncrona (60 Hz) | 3600 RPM | 1800 RPM |
| Velocidad Síncrona (50 Hz) | 3000 RPM | 1500 RPM |
| Torque de Arranque | Generalmente menor | Generalmente mayor |
| Velocidad de Operación | Más alta | Más baja |
| Ruido | Potencialmente más alto | Generalmente más bajo |
| Aplicaciones Típicas | Bombas de alta velocidad, ventiladores de alta presión, compresores de aire de tornillo | Ventiladores, bombas, compresores, cintas transportadoras, mezcladoras, máquinas herramienta |
| Vibración | Puede ser mayor | Generalmente menor |
| Tamaño y Peso | Más compacto para la misma potencia | Generalmente más grande y pesado para la misma potencia |
Preguntas Frecuentes (FAQs)
¿Cómo se calcula la velocidad síncrona de un motor?
La velocidad síncrona se calcula con la fórmula Ns = (120 * f) / P, donde Ns es la velocidad síncrona en RPM, f es la frecuencia de la fuente de alimentación en Hz y P es el número de polos del motor.
¿Qué es el deslizamiento en un motor asíncrono?
El deslizamiento es la diferencia porcentual entre la velocidad síncrona del campo magnético del estator y la velocidad real del rotor. Es esencial para la inducción de corriente en el rotor y la generación de torque. Típicamente varía entre 0.5% y 5%.
¿Por qué un motor de 4 polos es más lento que uno de 2 polos?
Un motor de 4 polos es más lento porque, para una misma frecuencia, tener más polos significa que el campo magnético giratorio tiene que 'cubrir' más puntos en su rotación, resultando en una velocidad angular menor. La velocidad síncrona es inversamente proporcional al número de polos.
¿Cómo influye la frecuencia en la velocidad del motor?
La frecuencia de la fuente de alimentación tiene una relación directamente proporcional con la velocidad síncrona del motor. A mayor frecuencia, mayor velocidad síncrona, y viceversa.
¿Cuál es el rendimiento típico de un motor de inducción?
El rendimiento o eficiencia de los motores de inducción varía generalmente entre el 75% y el 95%, dependiendo de factores como la potencia del motor, el tipo de construcción, la carga de operación y el mantenimiento.
¿Para qué se utiliza un panel VFD con un motor de 4 polos?
Un panel VFD (Variador de Frecuencia) se utiliza para controlar y variar la velocidad del motor de 4 polos de manera precisa, ajustando la frecuencia y el voltaje de la energía suministrada. Esto permite optimizar el rendimiento de la aplicación, ahorrar energía y reducir el desgaste mecánico.
Conclusión
El motor asíncrono de 4 polos es una pieza fundamental en el arsenal de la ingeniería moderna. Su diseño, que privilegia un alto torque a velocidades moderadas y una operación eficiente y silenciosa, lo convierte en la opción ideal para una amplia gama de aplicaciones industriales y comerciales. Comprender su velocidad, tanto síncrona como real, y el concepto de deslizamiento, es crucial para su selección y operación óptima. Además, la capacidad de controlar su velocidad mediante un panel VFD amplía enormemente su versatilidad, permitiendo una adaptación precisa a las demandas de cada tarea.
Al considerar la eficiencia de estos motores, que oscila entre el 75% y el 95%, y los factores que la influyen, queda claro que la elección y el mantenimiento adecuados son clave para maximizar su rendimiento y minimizar los costos operativos. En un mundo donde la optimización energética es cada vez más importante, los motores de 4 polos continúan siendo una solución robusta y confiable, demostrando que la ingeniería bien aplicada es sinónimo de progreso y sostenibilidad.
Si quieres conocer otros artículos parecidos a Velocidad de un Motor Asíncrono de 4 Polos puedes visitar la categoría Cálculos.