29/06/2024
Las ecuaciones diferenciales son una herramienta matemática fundamental para describir y modelar fenómenos en una amplia gama de disciplinas científicas y de ingeniería. Desde la física hasta la economía, pasando por la biología y la química, estas ecuaciones nos permiten comprender cómo cambian las cantidades en función de otras. Dentro de esta vasta categoría, un tipo particular que destaca por su importancia y relativa simplicidad de resolución son las ecuaciones diferenciales de segundo orden homogéneas con coeficientes constantes. Comprender estas ecuaciones no solo es clave para el avance académico, sino también para la aplicación práctica en el diseño de sistemas y la predicción de comportamientos.
En este artículo, exploraremos en profundidad qué es exactamente una ecuación diferencial homogénea de segundo orden con coeficientes constantes, desglosaremos cada término de su definición, y lo más importante, presentaremos el método general para resolverlas, analizando los distintos escenarios que se pueden presentar en su solución general. Prepárese para desentrañar los secretos de estas poderosas expresiones matemáticas que son la base de muchos modelos dinámicos en el universo que nos rodea.
- ¿Qué son las Ecuaciones Diferenciales Homogéneas de Segundo Orden con Coeficientes Constantes?
- La Importancia y Aplicaciones de estas Ecuaciones
- El Método General de Solución: La Ecuación Característica
- Casos de Solución Basados en las Raíces de la Ecuación Característica
- Tabla Comparativa de Soluciones
- Preguntas Frecuentes (FAQ)
- ¿Qué sucede si la ecuación no es homogénea?
- ¿Qué representan las constantes c₁ y c₂ en la solución general?
- ¿Por qué son tan importantes los coeficientes constantes?
- ¿Se pueden resolver estas ecuaciones numéricamente?
- ¿Cuál es la diferencia entre amortiguamiento crítico, sobreamortiguado y subamortiguado?
¿Qué son las Ecuaciones Diferenciales Homogéneas de Segundo Orden con Coeficientes Constantes?
Una ecuación diferencial de segundo orden se considera homogénea y con coeficientes constantes si puede expresarse en la forma estándar:
ay'' + by' + cy = 0
Donde a, b y c son constantes numéricas reales (es decir, a, b, c ∈ ℝ), y a ≠ 0. Analicemos cada parte de esta definición para entenderla completamente:
De Segundo Orden: Esto significa que la derivada de mayor orden presente en la ecuación es la segunda derivada de la función desconocida
y(denotada comoy''od²y/dx²). Si solo hubiera una primera derivada (y'), sería de primer orden; si hubiera una tercera (y'''), sería de tercer orden, y así sucesivamente. El orden de una ecuación diferencial es crucial, ya que determina la complejidad de su solución y el número de constantes arbitrarias que aparecerán en la solución general.Homogénea: Una ecuación diferencial lineal se clasifica como homogénea si, y solo si, el término independiente (el término que no contiene la función
yni sus derivadas) es igual a cero. En nuestro caso, el lado derecho de la ecuaciónay'' + by' + cy = 0es cero. Si fuera diferente de cero (por ejemplo,ay'' + by' + cy = f(x), dondef(x)es una función no nula), la ecuación sería no homogénea. La naturaleza homogénea simplifica significativamente el proceso de encontrar la solución, ya que la solución de la ecuación homogénea es un componente fundamental de la solución de su contraparte no homogénea.Con Coeficientes Constantes: Esto implica que los coeficientes
a,bycque multiplican a la funciónyy a sus derivadas (y''yy') son números fijos y no dependen de la variable independiente (comúnmentexot). Esta característica es lo que permite el uso de la ecuación característica (o auxiliar), un método algebraico que transforma la ecuación diferencial en un problema de raíces de un polinomio, facilitando enormemente su resolución. Si los coeficientes fueran funciones dex(por ejemplo,x²y'' + xy' + y = 0), la ecuación sería de coeficientes variables, y su resolución requeriría técnicas mucho más avanzadas.
En resumen, estamos hablando de ecuaciones donde el cambio de una cantidad depende de su tasa de cambio y de su tasa de cambio de la tasa de cambio, y todo esto de una manera predecible y constante.
La Importancia y Aplicaciones de estas Ecuaciones
Las ecuaciones diferenciales homogéneas de segundo orden con coeficientes constantes no son meras abstracciones matemáticas; son la columna vertebral de la modelización de muchos sistemas físicos y de ingeniería. Su omnipresencia se debe a que describen sistemas lineales que exhiben oscilaciones o amortiguamiento, fenómenos comunes en la naturaleza y en la tecnología. Algunas de sus aplicaciones más destacadas incluyen:
Sistemas Mecánicos Vibratorios: Un resorte con una masa conectada oscila. Si consideramos la resistencia del aire (amortiguamiento) y la fuerza de restitución del resorte, la ecuación que describe el movimiento de la masa es típicamente una ecuación diferencial de segundo orden. Si no hay fuerza externa impulsora, es homogénea. Ejemplos incluyen péndulos amortiguados, sistemas de suspensión de vehículos y vibraciones en estructuras.
Circuitos Eléctricos RLC: En un circuito en serie que contiene una resistencia (R), un inductor (L) y un condensador (C), la corriente o la carga en el condensador se describe mediante una ecuación diferencial de segundo orden con coeficientes constantes. La resistencia proporciona el amortiguamiento, el inductor la inercia (análoga a la masa) y el condensador la capacidad de almacenamiento (análoga al resorte). Si no hay una fuente de voltaje externa, el circuito se rige por una ecuación homogénea.
Ingeniería Civil y Estructural: El análisis de la deflexión de vigas, la propagación de ondas en materiales o la estabilidad de puentes a menudo involucra este tipo de ecuaciones, especialmente cuando se estudian las respuestas naturales de las estructuras.
Acústica y Óptica: La propagación de ondas sonoras o luminosas en medios homogéneos puede ser descrita por ecuaciones diferenciales parciales que, bajo ciertas simplificaciones, se reducen a ecuaciones diferenciales ordinarias de segundo orden.
Su capacidad para modelar estos sistemas se debe a que la segunda derivada a menudo representa la aceleración o la curvatura, la primera derivada la velocidad o la tasa de cambio, y la función misma la posición o la cantidad. Los coeficientes constantes implican que las propiedades del sistema (masa, amortiguamiento, rigidez, resistencia, inductancia, capacitancia) no cambian con el tiempo o la posición.
El Método General de Solución: La Ecuación Característica
La clave para resolver cualquier ecuación diferencial homogénea de segundo orden con coeficientes constantes reside en la ecuación característica (también conocida como ecuación auxiliar). Este método se basa en la suposición de que la solución a ay'' + by' + cy = 0 es de la forma exponencial y = e^(rx), donde r es una constante que debemos determinar.
Si sustituimos y = e^(rx) en la ecuación diferencial, primero necesitamos sus derivadas:
y' = re^(rx)y'' = r²e^(rx)
Ahora, sustituimos estas expresiones en la ecuación original:
a(r²e^(rx)) + b(re^(rx)) + c(e^(rx)) = 0
Dado que e^(rx) nunca es cero, podemos dividir toda la ecuación por e^(rx), lo que nos deja con la ecuación característica:
ar² + br + c = 0
Esta es una ecuación cuadrática simple, y sus raíces r determinarán la forma de la solución general de la ecuación diferencial. Las raíces de esta ecuación cuadrática se pueden encontrar utilizando la fórmula general:
r = (-b ± √(b² - 4ac)) / (2a)
El discriminante ∆ = b² - 4ac es crucial, ya que su valor (positivo, cero o negativo) define la naturaleza de las raíces y, por lo tanto, la forma de la solución general de la ecuación diferencial.
Casos de Solución Basados en las Raíces de la Ecuación Característica
Existen tres casos posibles para las raíces de la ecuación característica, y cada uno conduce a una forma distinta de la solución general.
Caso 1: Raíces Reales y Distintas (∆ > 0)
Cuando el discriminante b² - 4ac es mayor que cero, la ecuación característica tiene dos raíces reales y distintas, digamos r₁ y r₂ (donde r₁ ≠ r₂). En este caso, la solución general de la ecuación diferencial es una combinación lineal de las dos soluciones exponenciales:
y(x) = c₁e^(r₁x) + c₂e^(r₂x)
Donde c₁ y c₂ son constantes arbitrarias que se determinarían si se proporcionan condiciones iniciales o de contorno (por ejemplo, el valor de y y y' en un punto específico). Este tipo de solución a menudo describe sistemas que regresan a un equilibrio sin oscilaciones, como un sistema amortiguado que no llega a oscilar.
Caso 2: Raíces Reales e Iguales (∆ = 0)
Si el discriminante b² - 4ac es igual a cero, la ecuación característica tiene una única raíz real repetida, r₁ = r₂ = r. En este escenario, la solución e^(rx) es una de las soluciones linealmente independientes, pero necesitamos una segunda solución para formar la solución general. Se puede demostrar que la segunda solución linealmente independiente es xe^(rx). Por lo tanto, la solución general es:
y(x) = c₁e^(rx) + c₂xe^(rx)
Este caso se conoce como amortiguamiento crítico en sistemas físicos, donde el sistema regresa al equilibrio lo más rápido posible sin oscilar. La presencia del término x en la segunda solución es crucial para asegurar la independencia lineal de las soluciones.
Caso 3: Raíces Complejas Conjugadas (∆ < 0)
Cuando el discriminante b² - 4ac es menor que cero, la ecuación característica tiene dos raíces complejas conjugadas de la forma r = α ± iβ, donde α = -b/(2a) es la parte real y β = √(-(b² - 4ac))/(2a) es la parte imaginaria. A partir de la fórmula de Euler (e^(ix) = cos(x) + isin(x)), la solución general, expresada en términos de funciones reales, es:
y(x) = e^( αx)(c₁cos(βx) + c₂sin(βx))
Esta forma de la solución es característica de sistemas que exhiben oscilaciones. El término e^( αx) representa la amplitud de la oscilación (amortiguada si α < 0, creciente si α > 0, o constante si α = 0), mientras que los términos de coseno y seno describen la naturaleza oscilatoria. Este es el caso que modela las vibraciones amortiguadas o no amortiguadas en sistemas mecánicos y las oscilaciones en circuitos RLC.
Tabla Comparativa de Soluciones
| Tipo de Raíces | Condición del Discriminante (∆ = b² - 4ac) | Forma de la Solución General y(x) | Descripción del Comportamiento |
|---|---|---|---|
| Reales y Distintas (r₁ ≠ r₂) | ∆ > 0 | c₁e^(r₁x) + c₂e^(r₂x) | No oscilatorio, retorno al equilibrio (sobreamortiguado). |
| Reales e Iguales (r₁ = r₂ = r) | ∆ = 0 | c₁e^(rx) + c₂xe^(rx) | No oscilatorio, retorno más rápido al equilibrio (amortiguamiento crítico). |
| Complejas Conjugadas (α ± iβ) | ∆ < 0 | e^( αx)(c₁cos(βx) + c₂sin(βx)) | Oscilatorio (amortiguado si α < 0, no amortiguado si α = 0, creciente si α > 0). |
Preguntas Frecuentes (FAQ)
¿Qué sucede si la ecuación no es homogénea?
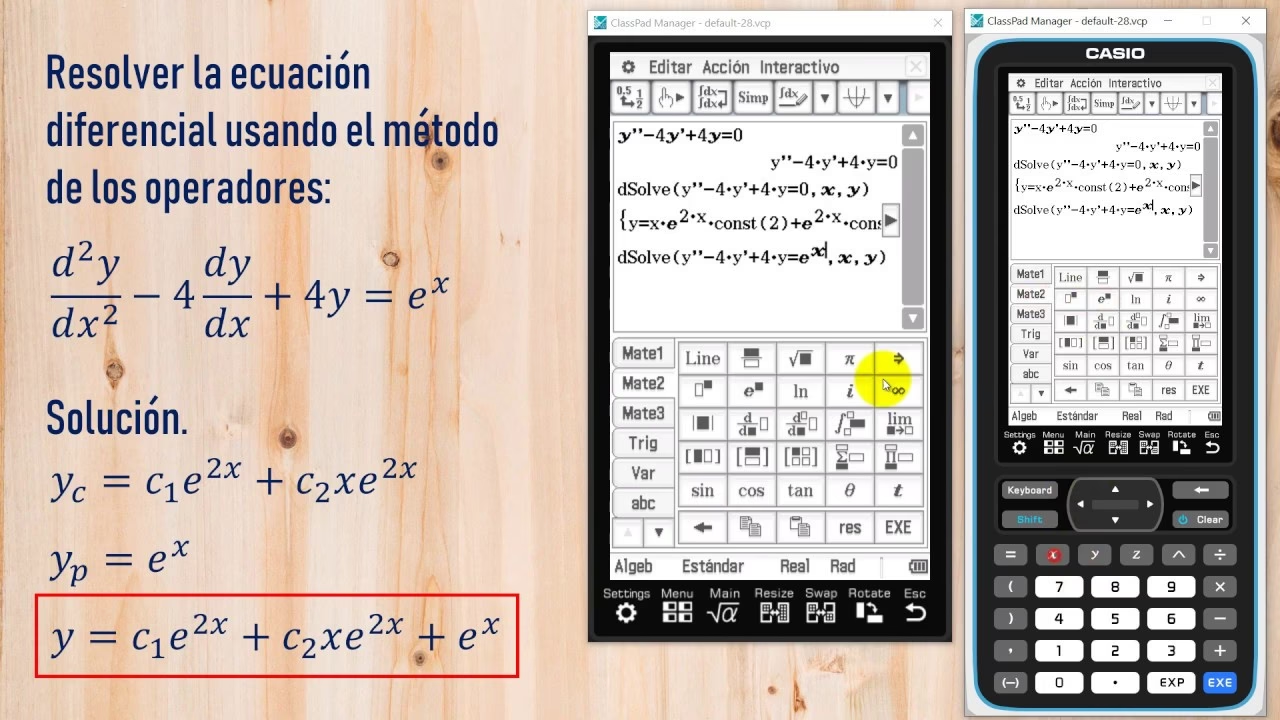
Si la ecuación no es homogénea (es decir, ay'' + by' + cy = f(x) donde f(x) ≠ 0), la solución general consta de dos partes: la solución de la ecuación homogénea asociada (y_h) y una solución particular (y_p) de la ecuación no homogénea. Es decir, y(x) = y_h(x) + y_p(x). La y_h se obtiene con los métodos descritos en este artículo, mientras que la y_p se encuentra usando técnicas como el método de coeficientes indeterminados o la variación de parámetros, dependiendo de la forma de f(x).
¿Qué representan las constantes c₁ y c₂ en la solución general?
Las constantes c₁ y c₂ son constantes de integración arbitrarias. Su valor específico se determina aplicando condiciones adicionales al problema, conocidas como condiciones iniciales o condiciones de contorno. Por ejemplo, en un problema de valor inicial, se podría especificar el valor de y(x₀) y y'(x₀) para un x₀ dado. Estas dos condiciones son necesarias y suficientes para determinar los valores únicos de c₁ y c₂, ya que la ecuación es de segundo orden.
¿Por qué son tan importantes los coeficientes constantes?
Los coeficientes constantes simplifican enormemente la resolución de la ecuación diferencial. Permiten la transformación de la ecuación diferencial en una ecuación algebraica (la ecuación característica), cuyas raíces pueden encontrarse fácilmente. Si los coeficientes fueran variables (funciones de x), el método de la ecuación característica no sería aplicable directamente, y se necesitarían técnicas de resolución mucho más complejas, como series de potencias o transformadas integrales, lo que hace que estas ecuaciones sean un punto de partida fundamental en el estudio de las ecuaciones diferenciales.
¿Se pueden resolver estas ecuaciones numéricamente?
Sí, absolutamente. Aunque el método analítico (encontrar una fórmula explícita para y(x)) es preferible cuando es posible, muchas ecuaciones diferenciales (incluyendo las de segundo orden, si las condiciones son demasiado complejas o los coeficientes no son constantes) no tienen soluciones analíticas simples. En esos casos, se utilizan métodos numéricos (como el método de Euler, Runge-Kutta, etc.) para aproximar la solución en puntos discretos. Estos métodos son ampliamente utilizados en simulaciones por computadora y modelado de sistemas complejos.
¿Cuál es la diferencia entre amortiguamiento crítico, sobreamortiguado y subamortiguado?
Estos términos se refieren al comportamiento de sistemas físicos, como osciladores o circuitos, modelados por ecuaciones homogéneas de segundo orden.
- Sobreamortiguado (Raíces Reales y Distintas): El sistema vuelve al equilibrio lentamente sin oscilar, debido a una gran resistencia o amortiguamiento.
- Amortiguamiento Crítico (Raíces Reales e Iguales): El sistema regresa al equilibrio lo más rápido posible sin sobrepasarlo ni oscilar. Es el punto óptimo entre la rapidez y la estabilidad.
- Subamortiguado (Raíces Complejas Conjugadas con α < 0): El sistema oscila alrededor del equilibrio, pero la amplitud de las oscilaciones disminuye con el tiempo debido al amortiguamiento.
- No Amortiguado (Raíces Complejas Conjugadas con α = 0): El sistema oscila indefinidamente sin pérdida de energía, manteniendo una amplitud constante.
Las ecuaciones diferenciales homogéneas de segundo orden con coeficientes constantes son un pilar en el estudio de las matemáticas aplicadas y la ingeniería. Su estructura relativamente sencilla permite la existencia de un método de resolución sistemático, basado en la ecuación característica, que transforma un problema de cálculo en uno de álgebra. La comprensión de los tres casos de raíces (reales distintas, reales iguales y complejas conjugadas) es fundamental, ya que cada uno describe un comportamiento físico distinto, desde el retorno suave a la estabilidad hasta las oscilaciones armónicas. Dominar estas ecuaciones no solo proporciona una habilidad matemática valiosa, sino que también abre la puerta a una comprensión más profunda de cómo los sistemas dinámicos se comportan en el mundo real.
Si quieres conocer otros artículos parecidos a Ecuaciones Diferenciales Homogéneas de Segundo Orden puedes visitar la categoría Matemáticas.