08/10/2022
En el vasto universo de las matemáticas, y en particular dentro del álgebra lineal, las transformaciones lineales representan un concepto fundamental. Son mucho más que simples funciones; son herramientas poderosas que nos permiten entender cómo los espacios vectoriales interactúan entre sí y cómo los vectores se 'mueven' o 'cambian' de una manera estructurada y predecible. Si alguna vez te has preguntado cómo funcionan las rotaciones en gráficos 3D, el escalado de imágenes o incluso ciertos principios de la física, la respuesta a menudo se encuentra en el corazón de las transformaciones lineales.
Este artículo te guiará a través de la esencia de las transformaciones lineales, desde su definición formal hasta cómo determinar si una función dada es una de ellas, pasando por su representación más práctica: las matrices. Prepárate para descubrir no solo el 'qué' sino también el 'cómo' y el 'porqué' de estas fascinantes operaciones matemáticas.
- ¿Qué Son las Transformaciones Lineales? Una Definición Clara
- ¿Cómo Determinar si una Función es una Transformación Lineal? El Proceso de Cálculo
- La Matriz de una Transformación Lineal: Cómo se 'Calcula' en la Práctica
- Tipos Comunes de Transformaciones Lineales
- Conceptos Clave Asociados a las Transformaciones Lineales
- Transformaciones Lineales vs. No Lineales: Una Comparación
- Aplicaciones Prácticas de las Transformaciones Lineales
- Preguntas Frecuentes sobre Transformaciones Lineales
- Conclusión
¿Qué Son las Transformaciones Lineales? Una Definición Clara
En su forma más básica, una transformación lineal es una función especial que mapea vectores de un espacio vectorial a otro, manteniendo intactas ciertas propiedades fundamentales de la estructura vectorial. Imagina que tienes un conjunto de vectores en un espacio (dominio) y quieres 'moverlos' o 'modificarlos' para que aparezcan en otro espacio (codominio). Una transformación lineal es la regla que rige este movimiento, pero con dos condiciones muy estrictas:
- Preservación de la Suma de Vectores: Si tomas dos vectores, los sumas y luego aplicas la transformación, el resultado debe ser el mismo que si aplicaras la transformación a cada vector por separado y luego sumaras sus imágenes. Formalmente, para cualquier par de vectores u y v en el dominio, se cumple que
F(u + v) = F(u) + F(v). - Preservación del Producto por un Escalar: Si tomas un vector, lo multiplicas por un escalar (un número real) y luego aplicas la transformación, el resultado debe ser el mismo que si aplicaras la transformación al vector primero y luego multiplicaras su imagen por el mismo escalar. Formalmente, para cualquier vector v en el dominio y cualquier escalar k, se cumple que
F(k.v) = k.F(v).
Estas dos condiciones son el corazón de la definición y son lo que distingue a una transformación lineal de cualquier otra función entre espacios vectoriales.
Propiedades Fundamentales de las Transformaciones Lineales
A partir de las dos condiciones de la definición, se derivan varias propiedades importantes que las transformaciones lineales siempre cumplen:
- La Imagen del Vector Nulo: Una transformación lineal siempre mapea el vector nulo del dominio al vector nulo del codominio. Es decir,
T(0V) = 0W. Esta es una propiedad crucial y a menudo la primera que se verifica, ya que si no se cumple, la función no es una transformación lineal. Podemos demostrarlo fácilmente:T(0V) = T(0 * v) = 0 * T(v) = 0W. Aquí, hemos expresado el vector nulo como el producto del escalar 0 por cualquier vector del espacio vectorial V, y luego hemos utilizado la segunda condición de la definición. - La Imagen del Vector Opuesto: La imagen del vector opuesto
(-v)es igual al opuesto de la imagen dev. Es decir,T(-v) = -T(v). Esto se demuestra de manera similar:T(-v) = T(-1 * v) = -1 * T(v) = -T(v). - Preservación de Combinaciones Lineales: Una de las propiedades más potentes es que una transformación lineal "transporta" combinaciones lineales del dominio al codominio, conservando los escalares. Si tienes una combinación lineal de vectores
α1v1 + α2v2 + ... + αrvren el dominio, su imagen bajo la transformación F seráα1F(v1) + α2F(v2) + ... + αrF(vr). Esto significa que la estructura lineal se mantiene a través de la transformación.
¿Cómo Determinar si una Función es una Transformación Lineal? El Proceso de Cálculo
Para determinar si una función dada es o no una transformación lineal, debemos verificar rigurosamente las dos condiciones fundamentales. Aquí te presentamos un proceso paso a paso, ilustrado con ejemplos:
Paso 1: La Prueba del Vector Nulo (Condición Necesaria)
Antes de sumergirte en las dos condiciones principales, un buen primer paso es verificar si la imagen del vector nulo del dominio es el vector nulo del codominio. Si esta condición no se cumple, puedes afirmar inmediatamente que la función NO es una transformación lineal, ahorrándote el trabajo de verificar las otras propiedades.
Paso 2: Verificación de la Condición de Suma
Toma dos vectores genéricos del espacio vectorial del dominio, digamos u y v. Calcula F(u + v). Luego, calcula F(u) + F(v). Si ambos resultados son idénticos, la primera condición se cumple.
Paso 3: Verificación de la Condición de Producto por un Escalar
Toma un vector genérico del dominio, digamos v, y un escalar genérico k (un número real). Calcula F(k.v). Luego, calcula k.F(v). Si ambos resultados son idénticos, la segunda condición se cumple.
Si ambas condiciones (suma y producto por escalar) se cumplen, entonces, y solo entonces, la función es una transformación lineal.
Ejemplos Prácticos de Verificación:
Ejemplo 1: Una Transformación Lineal de R3 a R2
Consideremos la función T: R3 → R2 definida por T((x, y, z)) = (x + z, y - 2z).
Resolución:
- Prueba del Vector Nulo:
T((0, 0, 0)) = (0 + 0, 0 - 2*0) = (0, 0). Se cumple. La función es una candidata. - Condición 1 (Suma):
Seanu = (u1, u2, u3)yv = (v1, v2, v3).u + v = (u1 + v1, u2 + v2, u3 + v3)T(u + v) = ((u1 + v1) + (u3 + v3), (u2 + v2) - 2(u3 + v3))T(u + v) = (u1 + v1 + u3 + v3, u2 + v2 - 2u3 - 2v3)
Por otro lado:T(u) = (u1 + u3, u2 - 2u3)T(v) = (v1 + v3, v2 - 2v3)T(u) + T(v) = (u1 + u3 + v1 + v3, u2 - 2u3 + v2 - 2v3)
Comparando, vemos queT(u + v) = T(u) + T(v). Se cumple la primera condición. - Condición 2 (Producto por un Escalar):
Seav = (v1, v2, v3)ykun escalar.k.v = (kv1, kv2, kv3)T(k.v) = (kv1 + kv3, kv2 - 2kv3)T(k.v) = k(v1 + v3, v2 - 2v3)T(k.v) = k.T(v). Se cumple la segunda condición.
Como T cumple ambas condiciones, es una transformación lineal.
Ejemplo 2: Transformación Lineal con Polinomios
Sea la función F: P2 → R definida por F(p) = p(0), donde P2 es el conjunto de polinomios de grado menor o igual que dos.
Resolución:
- Prueba del Vector Nulo: El polinomio nulo en
P2esp(x) = 0x2 + 0x + 0. Al evaluarlo enx=0, obtenemosF(0) = 0. Se cumple. - Condición 1 (Suma):
Seanp(x)yq(x)dos polinomios enP2.F(p + q) = (p + q)(0). Por definición de suma de funciones,(p + q)(0) = p(0) + q(0).
Sabemos queF(p) = p(0)yF(q) = q(0). Por lo tanto,F(p + q) = F(p) + F(q). Se cumple. - Condición 2 (Producto por un Escalar):
Seap(x)un polinomio enP2ykun escalar.F(k.p) = (k.p)(0). Por definición de producto de función por escalar,(k.p)(0) = k.p(0).
Sabemos queF(p) = p(0). Por lo tanto,F(k.p) = k.F(p). Se cumple.
Dado que F cumple ambas condiciones, es una transformación lineal.
Ejemplo 3: Transformación Lineal con Producto Vectorial
Sea T: R3 → R3 definida por T(v) = v x w0, donde w0 es un vector fijo en R3 y 'x' denota el producto vectorial.
Resolución:
- Prueba del Vector Nulo:
T((0,0,0)) = (0,0,0) x w0 = (0,0,0). Se cumple. - Condición 1 (Suma):
Seanv1, v2en R3.T(v1 + v2) = (v1 + v2) x w0. Por la propiedad distributiva del producto vectorial, esto es igual a(v1 x w0) + (v2 x w0).
Esto es exactamenteT(v1) + T(v2). Se cumple. - Condición 2 (Producto por un Escalar):
Seaven R3 ykun escalar.T(k.v) = (k.v) x w0. Por la propiedad del producto vectorial con escalares, esto es igual ak.(v x w0).
Esto es exactamentek.T(v). Se cumple.
Por lo tanto, esta función también es una transformación lineal.
Ejemplo 4: Identificando Funciones NO Lineales
Es igualmente importante reconocer cuándo una función NO es una transformación lineal. A menudo, basta con que una de las condiciones falle.
- Función 1:
T1: R2 → R2, definida porT1((x, y)) = (2x - 1, y).
Aquí, la prueba del vector nulo es suficiente:T1((0, 0)) = (2*0 - 1, 0) = (-1, 0). Dado que el resultado no es el vector nulo(0, 0),T1no es una transformación lineal. Las transformaciones lineales nunca tienen términos constantes que no sean cero. - Función 2:
T2: R2 → R2, definida porT2((a, b)) = (a2, b).
Probemos la condición de producto por un escalar.
Seav = (a, b)ykun escalar.T2(k.v) = T2((ka, kb)) = ((ka)2, kb) = (k2a2, kb).
Por otro lado,k.T2(v) = k.(a2, b) = (ka2, kb).
Como(k2a2, kb) ≠ (ka2, kb)(a menos quek=0ok=1), la segunda condición no se cumple. Por lo tanto,T2no es una transformación lineal. La presencia de términos de grado superior (comoa2) o multiplicaciones entre variables suele indicar que no es lineal.
La Matriz de una Transformación Lineal: Cómo se 'Calcula' en la Práctica
Una de las razones por las que las transformaciones lineales son tan poderosas es que cada una de ellas puede representarse de manera única mediante una matriz. Esto significa que aplicar una transformación lineal a un vector es equivalente a multiplicar ese vector (expresado como una matriz columna) por una matriz específica. Esta es la forma más común de calcular una transformación lineal en aplicaciones prácticas.
¿Cómo Encontrar la Matriz de una Transformación Lineal?
Para encontrar la matriz asociada a una transformación lineal T que va de Rn a Rm, basta con transformar los vectores de la base canónica del dominio y colocar sus imágenes como columnas de la matriz. La base canónica de Rn está formada por los vectores e1 = (1, 0, ..., 0), e2 = (0, 1, ..., 0), ..., en = (0, 0, ..., 1).
Así, si T(e1) = w1, T(e2) = w2, ..., T(en) = wn, donde cada wi es un vector en Rm, entonces la matriz de la transformación A será:
A = [w1 | w2 | ... | wn]Donde cada wi es una columna de la matriz A.
Ejemplo: Hallar la Matriz de la Transformación del Ejemplo 1
Retomemos T: R3 → R2 definida por T((x, y, z)) = (x + z, y - 2z).
Los vectores de la base canónica de R3 son e1 = (1, 0, 0), e2 = (0, 1, 0), e3 = (0, 0, 1).
T(e1) = T((1, 0, 0)) = (1 + 0, 0 - 2*0) = (1, 0)T(e2) = T((0, 1, 0)) = (0 + 0, 1 - 2*0) = (0, 1)T(e3) = T((0, 0, 1)) = (0 + 1, 0 - 2*1) = (1, -2)
La matriz A de esta transformación es:
A = [[1, 0, 1],
[0, 1, -2]]Aplicando la Transformación Usando la Matriz
Una vez que tienes la matriz A de una transformación lineal T, para calcular la imagen de cualquier vector v en el dominio, simplemente multiplicas la matriz A por el vector v (expresado como una columna):
T(v) = A * vPor ejemplo, para el vector v = (2, 3, 1) en el ejemplo anterior:
T((2, 3, 1)) = [[1, 0, 1], [2]
[0, 1, -2]] * [3]
[1]= [(1*2 + 0*3 + 1*1), (0*2 + 1*3 + (-2)*1)]= [(2 + 0 + 1), (0 + 3 - 2)]= (3, 1)
Esto coincide con el resultado si aplicamos la definición original: T((2, 3, 1)) = (2 + 1, 3 - 2*1) = (3, 1).
Esta capacidad de representar transformaciones lineales como matrices es lo que las hace tan útiles en computación, ingeniería y física, ya que permite realizar operaciones complejas de manera eficiente mediante álgebra matricial.

Tipos Comunes de Transformaciones Lineales
Las transformaciones lineales se manifiestan de muchas maneras, especialmente en geometría y gráficos por computadora:
- Rotación: Giran un vector alrededor de un punto o eje.
- Escalado (Dilatación/Contracción): Alargan o encogen un vector, manteniendo su dirección.
- Reflexión: Invierten un vector con respecto a una línea o plano.
- Proyección: Mapean un vector sobre un subespacio, como proyectar un vector 3D sobre un plano 2D.
- Cizallamiento (Shear): Desplazan puntos en una dirección proporcional a su distancia de un eje, creando un efecto de "inclinación".
Conceptos Clave Asociados a las Transformaciones Lineales
Para comprender a fondo las transformaciones lineales, es crucial familiarizarse con dos subespacios fundamentales:
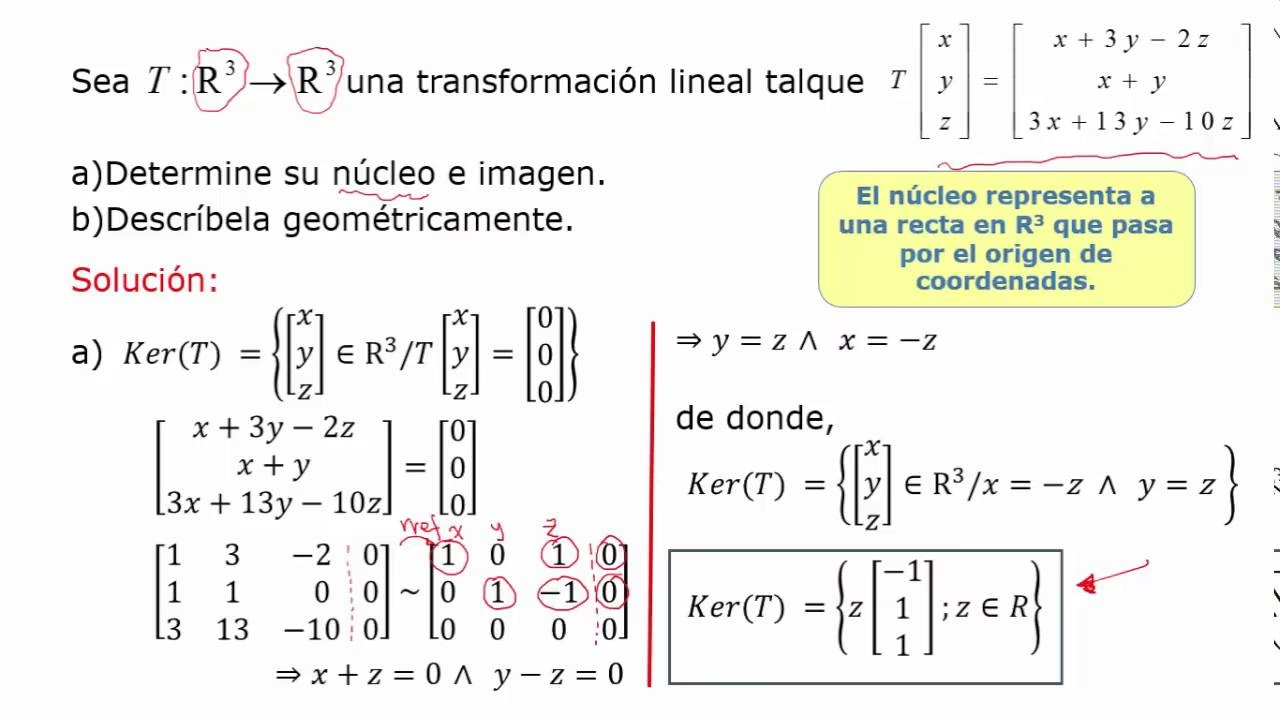
El Núcleo (Kernel) de una Transformación Lineal
El núcleo de una transformación lineal T (denotado como Ker(T) o N(T)) es el conjunto de todos los vectores en el dominio que la transformación mapea al vector nulo del codominio. Es decir:
Ker(T) = {v ∈ V | T(v) = 0W}El núcleo es siempre un subespacio del dominio V. Su dimensión (conocida como la nulidad de la transformación) nos da información sobre la inyectividad de T: una transformación es inyectiva (uno a uno) si y solo si su núcleo contiene solo al vector nulo.
La Imagen (Image) de una Transformación Lineal
La imagen de una transformación lineal T (denotada como Im(T) o R(T)) es el conjunto de todos los vectores en el codominio que son imágenes de al menos un vector del dominio. Es decir:
Im(T) = {w ∈ W | existe v ∈ V tal que T(v) = w}La imagen es siempre un subespacio del codominio W. Su dimensión (conocida como el rango de la transformación) nos da información sobre la suprayectividad de T: una transformación es suprayectiva (sobre) si y solo si su imagen es igual a todo el codominio.
El Teorema de la Dimensión (o Teorema del Rango-Nulidad) establece una relación fundamental entre ellos: dim(V) = dim(Ker(T)) + dim(Im(T)).
Transformaciones Lineales vs. No Lineales: Una Comparación
Es importante distinguir entre las funciones que cumplen las propiedades de linealidad y las que no. Aquí una tabla comparativa:
| Característica | Transformación Lineal | Transformación No Lineal |
|---|---|---|
F(u + v) | Siempre igual a F(u) + F(v) | No necesariamente igual a F(u) + F(v) |
F(k.v) | Siempre igual a k.F(v) | No necesariamente igual a k.F(v) |
F(0V) | Siempre igual a 0W | Puede ser diferente de 0W |
| Términos en la regla | Solo términos lineales (variables elevadas a la 1, sin constantes) | Puede contener términos constantes, potencias (x2), productos de variables (xy), funciones trigonométricas, etc. |
| Representación Matricial | Siempre puede representarse por una matriz | Generalmente no puede representarse por una matriz única |
| Comportamiento Geométrico | Preserva orígenes, líneas rectas y paralelismo | Puede curvar líneas, cambiar orígenes, etc. |
| Ejemplos | Rotaciones, escalados, proyecciones | Traslaciones (no pasan por el origen), funciones cuadráticas, exponenciales |
Aplicaciones Prácticas de las Transformaciones Lineales
Las transformaciones lineales no son solo un concepto abstracto; tienen aplicaciones omnipresentes:
- Gráficos por Computadora: Desde videojuegos hasta películas de animación, las rotaciones, escalados y traslaciones de objetos 3D se realizan mediante transformaciones lineales (y afines).
- Procesamiento de Imágenes: Operaciones como el cambio de tamaño, el recorte o la aplicación de filtros (como el desenfoque o la detección de bordes) a menudo implican transformaciones lineales o sus extensiones.
- Física e Ingeniería: Descripción de movimientos, análisis de sistemas dinámicos, mecánica cuántica, circuitos eléctricos y muchísimos otros campos utilizan el formalismo de las transformaciones lineales.
- Ciencia de Datos y Machine Learning: Algoritmos como la reducción de dimensionalidad (PCA), redes neuronales y análisis de componentes utilizan intensivamente conceptos de álgebra lineal y transformaciones.
- Economía: Modelos de entrada-salida, análisis de mercados y optimización.
Preguntas Frecuentes sobre Transformaciones Lineales
¿Cómo saber si algo es una transformación lineal?
Para saber si una función es una transformación lineal, debes verificar dos condiciones fundamentales: 1) Si la transformación de la suma de dos vectores es igual a la suma de las transformaciones individuales de esos vectores (F(u + v) = F(u) + F(v)). 2) Si la transformación de un escalar por un vector es igual al escalar por la transformación del vector (F(k.v) = k.F(v)). Además, como una comprobación rápida, la imagen del vector nulo del dominio siempre debe ser el vector nulo del codominio.
¿Cómo transformar de R3 a R2?
Para transformar un vector de R3 a R2 mediante una transformación lineal, necesitas una matriz de 2 filas y 3 columnas (una matriz de 2x3). Cuando multiplicas esta matriz por un vector columna de 3x1 (el vector de R3), el resultado será un vector columna de 2x1 (el vector transformado en R2). La forma específica de la matriz dependerá de la transformación lineal deseada (por ejemplo, una proyección sobre un plano).
¿Qué es el núcleo de una transformación lineal?
El núcleo de una transformación lineal (también llamado kernel) es el conjunto de todos los vectores en el espacio de partida (dominio) que son mapeados al vector nulo del espacio de llegada (codominio). Es un subespacio del dominio y su dimensión indica si la transformación es inyectiva (solo el vector nulo está en el núcleo).
¿Qué es la imagen de una transformación lineal?
La imagen de una transformación lineal es el conjunto de todos los vectores en el espacio de llegada (codominio) que son el resultado de aplicar la transformación a algún vector del espacio de partida (dominio). Es un subespacio del codominio y su dimensión (rango) indica qué tan "grande" es el subespacio que la transformación puede alcanzar, y si es suprayectiva (si la imagen es todo el codominio).
¿Para qué sirven las transformaciones lineales?
Las transformaciones lineales son fundamentales porque modelan procesos que preservan la estructura lineal, como rotaciones, escalados, reflexiones y proyecciones. Son esenciales en gráficos por computadora para manipular objetos 3D, en física para describir sistemas dinámicos, en ingeniería para análisis de circuitos y sistemas de control, y en ciencia de datos para reducción de dimensionalidad y machine learning. Permiten simplificar problemas complejos al representarlos en un marco matricial.
Conclusión
Las transformaciones lineales son una piedra angular del álgebra lineal, ofreciendo un marco robusto para entender cómo los vectores y los espacios vectoriales interactúan. Desde la verificación de sus condiciones fundamentales hasta su poderosa representación matricial, comprender las transformaciones lineales no solo enriquece nuestro conocimiento matemático, sino que también abre las puertas a una comprensión más profunda de fenómenos en campos tan diversos como la computación, la física y la ingeniería. Dominar este concepto es dar un paso gigante hacia la maestría del lenguaje universal de las matemáticas.
Si quieres conocer otros artículos parecidos a Transformaciones Lineales: Cálculo y Conceptos Clave puedes visitar la categoría Matemáticas.