18/09/2024
La matriz de rigidez es un concepto central en el análisis estructural y la mecánica de materiales, esencial para comprender cómo los cuerpos se deforman bajo la acción de fuerzas externas. Representa la relación entre las fuerzas aplicadas y los desplazamientos resultantes en un sistema o material. Su correcta determinación es crucial para el diseño seguro y eficiente de estructuras, desde componentes aeroespaciales hasta edificios y puentes. En este artículo, exploraremos dos enfoques principales para obtener esta matriz vital: uno basado en las propiedades constitutivas de los materiales y otro mediante formulaciones numéricas avanzadas.
Comprender la rigidez de un material o una estructura nos permite predecir su comportamiento, asegurando que las deformaciones se mantengan dentro de límites aceptables y que no se produzcan fallos. Es la contraparte directa de la flexibilidad o complianza, y su correcto cálculo es la piedra angular de muchos modelos ingenieriles.
- La Matriz de Rigidez para Materiales Ortótropos Especiales
- Cálculo de la Matriz de Rigidez para Placas: El Enfoque de Integrales Refinables
- ¿Cómo Hallar la Rigidez de una Columna?
- Preguntas Frecuentes (FAQ)
- ¿Qué es la rigidez en ingeniería?
- ¿Por qué es importante la matriz de rigidez?
- ¿Cuál es la diferencia entre rigidez y complianza (flexibilidad)?
- ¿Qué son los materiales ortótropos?
- ¿Qué es el método de Galerkin en este contexto?
- ¿Cómo se relacionan las constantes elásticas con la matriz de rigidez de un material?
- ¿Qué implicaciones tienen las restricciones en las constantes elásticas para la matriz de rigidez?
- ¿Existen otras formas comunes de obtener matrices de rigidez?
La Matriz de Rigidez para Materiales Ortótropos Especiales
En el ámbito de la mecánica de materiales, la matriz de rigidez es fundamental para describir la relación entre tensiones y deformaciones. Para un material, esta matriz, convencionalmente denotada como [Q], se obtiene invirtiendo la matriz de complianza o flexibilidad [S]. La forma particular que aquí se describe corresponde a un material ortótropo especial, que posee tres planos de simetría perpendiculares entre sí, lo que le confiere propiedades elásticas diferentes en tres direcciones mutuamente perpendiculares.
La relación tensión-deformación para una lámina ortótropa especial se expresa de la siguiente manera, donde σ representa el vector de tensiones y ε el vector de deformaciones:
σ1
σ2
σ3
σ4
σ5
σ6
=
Q11 Q12 Q13 0 0 0
Q12 Q22 Q23 0 0 0
Q13 Q23 Q33 0 0 0
0 0 0 Q44 0 0
0 0 0 0 Q55 0
0 0 0 0 0 Q66
*
ε1
ε2
ε3
ε4
ε5
ε6
Las componentes individuales de esta matriz [Q] se expresan en términos de las constantes elásticas del material, que incluyen los módulos de Young (Ei), los coeficientes de Poisson (νij) y los módulos de cizallamiento (Gij). La matriz de rigidez se construye a partir de estas propiedades fundamentales del material, encapsulando su respuesta elástica a diferentes tipos de carga. A continuación, se detallan las expresiones para cada componente:
Q11 = E1 (1 - ν23ν32) / ΔQ22 = E2 (1 - ν31ν13) / ΔQ33 = E3 (1 - ν12ν21) / ΔQ12 = E1 (ν21 + ν31ν23) / Δ = E2 (ν12 + ν32ν13) / ΔQ13 = E1 (ν31 + ν21ν32) / Δ = E3 (ν13 + ν12ν23) / ΔQ23 = E2 (ν32 + ν12ν31) / Δ = E3 (ν23 + ν21ν13) / ΔQ44 = G23Q55 = G13Q66 = G12
Donde Δ (Delta) es un determinante que se define como:
Δ = 1 - ν12ν21 - ν23ν32 - ν31ν13 - 2ν13ν21ν32
Simplificaciones y Restricciones Físicas
Estas expresiones generales pueden simplificarse bajo ciertas condiciones. Por ejemplo, es común asumir que los módulos elásticos en las direcciones 2 y 3 son iguales (E2 = E3). Esta suposición implica que ν23 = ν32 y ν21ν13 = ν12ν31. Otras simplificaciones pueden derivarse de condiciones de carga específicas, como el estado de tensión plana, donde las tensiones en una dirección son despreciables.
Es crucial entender que las constantes elásticas no pueden tomar cualquier valor. Existen restricciones físicas que deben satisfacerse para que el material sea termodinámicamente estable y para que las matrices de rigidez y complianza sean definidas positivas. Esto significa que cada término de la diagonal principal de ambas matrices debe ser mayor que cero. Estas restricciones, generalizadas por Lempriere, se basan en la primera ley de la termodinámica y aseguran que la energía de deformación almacenada en el material sea siempre positiva.
Las principales restricciones son:
- Todos los módulos de Young y de cizallamiento deben ser positivos:
E1, E2, E3, G23, G13, G12 > 0. - Ciertas combinaciones de coeficientes de Poisson deben ser positivas:
1 - ν23ν32 > 0,1 - ν31ν13 > 0,1 - ν12ν21 > 0.
A partir de estas relaciones, se puede demostrar que νij < √(Ei / Ej), lo que impone límites a los valores de los coeficientes de Poisson. Por ejemplo, ν21 < √(E2 / E1). Además, el determinante Δ también debe ser mayor que cero:
Δ = 1 - ν12ν21 - ν23ν32 - ν31ν13 - 2ν13ν21ν32 > 0
Esta última expresión puede manipularse para mostrar relaciones más complejas entre los coeficientes de Poisson y los módulos elásticos, asegurando la consistencia física del modelo del material.
Cálculo de la Matriz de Rigidez para Placas: El Enfoque de Integrales Refinables
Más allá de la caracterización de materiales, la matriz de rigidez también es un componente clave en la formulación de problemas de elementos finitos o métodos variacionales para estructuras completas, como las placas. En este contexto, la matriz de rigidez global se construye a partir de contribuciones elementales o mediante formulaciones integrales directas.
La formulación de Galerkin, un método numérico ampliamente utilizado para resolver ecuaciones diferenciales parciales, conduce a un sistema lineal de ecuaciones donde la matriz de rigidez juega un papel central. Para problemas discretizados con funciones base Φj, el sistema lineal se expresa como AΦj cj = fj, donde AΦj es la matriz de rigidez a una sola escala, fj es el lado derecho (vector de cargas o fuerzas), y cj es el vector de coeficientes desconocidos.
A diferencia de los códigos de elementos finitos tradicionales, que primero calculan una matriz de rigidez elemental en un elemento de referencia y luego la ensamblan en una matriz global, el enfoque con integrales refinables calcula las entradas de la matriz de rigidez directamente como integrales de derivadas de funciones refinables sobre todo el dominio. Esto implica el cálculo de integrales de la forma:
∫Rd φ0(x) ∩i=1s Dμiφi(x - ki) dx
Donde φ0 es una función indicadora del dominio, Dμi son operadores de derivación y φi son las funciones refinables. Estas se denominan integrales refinables porque son refinables como funciones de los desplazamientos (k1, ..., ks). Su evaluación se reduce a la solución de un problema de valores propios que es únicamente soluble bajo ciertas condiciones de momentos discretos multivariados.
Ejemplo de Implementación y Optimización
Para ilustrar cómo se manejan estas integrales, consideremos el ejemplo de evaluar:
∫R2 (N1 ⊗ N1)(x) D11D00 (N3 ⊗ N2)(x - k1) D01D10 (N2 ⊗ N3)(x - k2) dx
Donde Di := ∂ / ∂xi. Este cálculo se puede gestionar mediante clases especializadas, como `IntegralFactor` en un entorno de programación. La clase `IntegralFactor` contendría las 'máscaras' (representaciones discretas de las funciones refinables) y las derivadas para los factores que aparecen en la integral. El proceso sería el siguiente:
int SpaceDim = 2; // Dimensión espacial Mask F1, F2, F3; Mask IntegralValues; F1 = N1() * N1(); // Máscara para el primer factor F2 = N3() * N2(); // Máscara para el segundo factor F3 = N2() * N3(); // Máscara para el tercer factor IntegralFactor Functions(SpaceDim); // Inicializa el objeto con la dimensión espacial Functions.AddFactor(F1); // Añade los factores Functions.AddFactor(F2); Functions.AddFactor(F3); // Define las derivadas para cada factor: Functions.putDer(2,1) = 1; // Derivada parcial en dirección 1 para el 2º factor Functions.putDer(3,2) = 1; // Derivada parcial en dirección 2 para el 3º factor integrals(Functions, IntegralValues); // Evalúa las integralesUn aspecto crucial de la eficiencia computacional es la capacidad de reescribir integrales de funciones de producto tensorial como un producto tensorial de integrales de componentes. Por ejemplo, la integral anterior puede reescribirse como:
(∫R N1(ξ) N'3(ξ - k11) N2(ξ - k12) dξ) * (∫R N1(η) N2(η - k21) N'3(η - k22) dη)
Esta factorización por componentes es significativamente más rápida, como se demuestra en la práctica (segundos versus milisegundos para ejemplos típicos). Esto se logra mediante una función `ComponentTensorproduct` que ensambla el resultado final a partir de las integrales de componentes unidimensionales.
Ensamblaje de la Matriz de Rigidez
Una vez que se han calculado los valores de las integrales refinables (que también son objetos `Mask`), el ensamblaje de la matriz de rigidez AΦj en el sistema de Galerkin es directo. Si los valores a(φj,k, φj,l) = αj a(φ0,0, φ0,l-k) se almacenan en una estructura `BilinearValues` y los límites de los multi-índices en `MatrixBorders`, el procedimiento de ensamblaje sería el siguiente:
int d; // Dimensión espacial MaskBorder MatrixBorders; int MatrixDim = MatrixBorders.getMaskDim(); matrix A(MatrixDim,MatrixDim); // Inicializa la matriz de rigidez double alphaj; // Constante de escala ivector k(d), l(d), difference(d); int RowIndex, ColIndex, ValueIndex; k = MatrixBorders.getLowBords(); for (int i=0; i<MatrixBorders.getMaskDim(); i++) { RowIndex = Index(k,MatrixBorders); l = MatrixBorders.getLowBords(); for (int j=0; j<MatrixBorders.getMaskDim(); j++) { difference = l - k; ColIndex = Index(l,MatrixBorders); ValueIndex = Index(difference,BilinearValues); A(RowIndex,ColIndex) = alphaj * BilinearValues.getI(ValueIndex); // Asigna el valor Inc(l,MatrixBorders); // Incrementa el índice de columna } Inc(k,MatrixBorders); // Incrementa el índice de fila }Este enfoque permite un cálculo eficiente y sistemático de la matriz de rigidez para problemas complejos, aprovechando las propiedades de las funciones refinables y las optimizaciones de producto tensorial.
¿Cómo Hallar la Rigidez de una Columna?
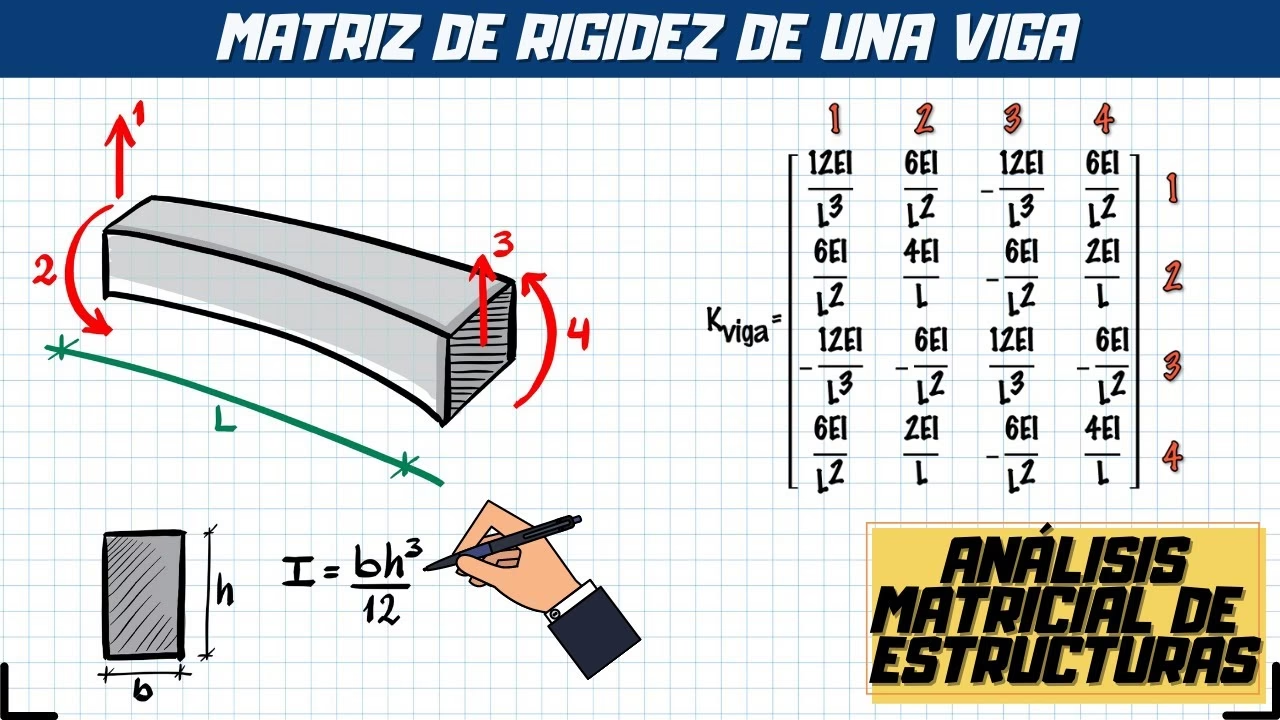
Lamentablemente, la información específica sobre cómo hallar la rigidez de una columna no fue proporcionada en el material de referencia. Sin embargo, es un tema fundamental en la ingeniería estructural. Generalmente, la rigidez de una columna (o de cualquier elemento estructural) se relaciona con su capacidad para resistir la deformación bajo carga. Para una columna axialmente cargada, la rigidez axial se define como EA/L, donde E es el módulo de Young del material, A es el área de la sección transversal y L es la longitud de la columna. Para la rigidez a flexión, que es más compleja y depende de las condiciones de apoyo y la forma de la sección, se utilizan conceptos como el momento de inercia de la sección transversal (I) y el módulo de Young. Por ejemplo, la rigidez a flexión de una viga en voladizo es 3EI/L3 en el extremo libre. Para casos más complejos como el pandeo de columnas, entran en juego las ecuaciones de Euler o métodos de elementos finitos que discretizan la columna en elementos.
Preguntas Frecuentes (FAQ)
¿Qué es la rigidez en ingeniería?
La rigidez es una medida de la resistencia de un cuerpo a la deformación bajo la aplicación de una fuerza o momento. Cuanto más rígido es un objeto, menor es la deformación que experimenta ante una carga dada. Es un parámetro crucial en el diseño de estructuras y componentes mecánicos, ya que determina su capacidad para mantener su forma y función bajo condiciones de servicio.
¿Por qué es importante la matriz de rigidez?
La matriz de rigidez es importante porque proporciona una representación matemática completa de cómo un sistema o material responderá a las cargas. Permite calcular los desplazamientos y las fuerzas internas en estructuras complejas, predecir el comportamiento vibratorio, analizar la estabilidad y optimizar el diseño para cumplir con los requisitos de seguridad y rendimiento. Es la base de métodos numéricos como el método de los elementos finitos.
¿Cuál es la diferencia entre rigidez y complianza (flexibilidad)?
La rigidez y la complianza son conceptos inversos. La rigidez (representada por la matriz [Q] o [K]) describe la relación entre las fuerzas (o tensiones) y los desplazamientos (o deformaciones). La complianza o flexibilidad (representada por la matriz [S] o [C]) describe la relación inversa, es decir, cómo un material se deforma bajo la aplicación de una tensión. Si la matriz de rigidez es [K], entonces la matriz de complianza es [K]-1, y viceversa.
¿Qué son los materiales ortótropos?
Los materiales ortótropos son aquellos cuyas propiedades mecánicas (como el módulo de Young o el coeficiente de Poisson) son diferentes en tres direcciones mutuamente perpendiculares. Ejemplos comunes incluyen la madera (con propiedades diferentes a lo largo y a través de la veta) y los materiales compuestos laminados (como la fibra de carbono o fibra de vidrio, donde las propiedades varían según la dirección de las fibras). Son más complejos de modelar que los materiales isótropos (con propiedades uniformes en todas las direcciones).
¿Qué es el método de Galerkin en este contexto?
El método de Galerkin es una técnica de discretización utilizada para transformar ecuaciones diferenciales continuas (que describen el comportamiento físico) en un sistema de ecuaciones algebraicas. En el contexto de la rigidez, se utiliza para obtener la matriz de rigidez de un sistema al proyectar las ecuaciones gobernantes sobre un conjunto de funciones base (funciones refinables en este caso). Esto permite resolver problemas complejos de mecánica de sólidos de manera numérica.
¿Cómo se relacionan las constantes elásticas con la matriz de rigidez de un material?
Las constantes elásticas (módulos de Young Ei, coeficientes de Poisson νij y módulos de cizallamiento Gij) son propiedades intrínsecas del material que describen su elasticidad. La matriz de rigidez de un material (como la matriz [Q] para materiales ortótropos) se construye directamente a partir de estas constantes. Cada elemento Qij de la matriz de rigidez es una combinación matemática específica de estas constantes, lo que permite relacionar las tensiones con las deformaciones en cualquier dirección.
¿Qué implicaciones tienen las restricciones en las constantes elásticas para la matriz de rigidez?
Las restricciones en las constantes elásticas (como Ei > 0 o Δ > 0) aseguran que la matriz de rigidez sea definida positiva. Una matriz de rigidez definida positiva es fundamental porque garantiza que la energía de deformación almacenada en el material es siempre positiva, lo cual es un requisito termodinámico para un material estable. Si la matriz no fuera definida positiva, implicaría que el material podría deformarse sin aplicar energía, o incluso liberar energía al deformarse, lo cual es físicamente imposible para un material elástico pasivo.
¿Existen otras formas comunes de obtener matrices de rigidez?
Sí, además de la inversión de la matriz de complianza para materiales y el método de integrales refinables para formulaciones avanzadas, el método de los Elementos Finitos (MEF) es la técnica más extendida. En MEF, una estructura se divide en pequeños elementos discretos. Para cada elemento, se calcula una matriz de rigidez elemental (generalmente usando funciones de forma y propiedades del material). Luego, todas estas matrices elementales se ensamblan en una matriz de rigidez global que representa la rigidez de toda la estructura. Este enfoque es muy versátil y se utiliza en una amplia gama de aplicaciones de ingeniería.
Si quieres conocer otros artículos parecidos a Descifrando la Matriz de Rigidez: Una Guía Completa puedes visitar la categoría Cálculos.