13/04/2023
En el vasto universo del álgebra lineal, existen herramientas que, aunque abstractas en su concepción, poseen un poder inmenso para resolver problemas prácticos en campos tan diversos como la ciencia de datos, la ingeniería o los gráficos por computadora. Una de estas herramientas fundamentales es la matriz de proyección. Este concepto nos permite entender cómo un vector "se proyecta" o "cae" sobre un subespacio, encontrando el punto más cercano dentro de ese subespacio. Es, en esencia, una forma de simplificar y aproximar información, conservando solo lo relevante respecto a una dirección o plano específico.
Imaginemos que tenemos un punto flotando en el espacio tridimensional y queremos encontrar su "sombra" perfecta sobre una pared. Esa "sombra" es la proyección del punto sobre el plano de la pared. En álgebra lineal, esta idea se formaliza a través de la matriz de proyección, que actúa como un operador que transforma cualquier vector en su componente dentro de un subespacio dado. Su utilidad radica en su capacidad para reducir la dimensionalidad, eliminar ruido o encontrar la mejor aproximación lineal a un conjunto de datos, como veremos a continuación.
¿Qué es una Matriz de Proyección?
Una matriz de proyección es una matriz cuadrada, usualmente denotada por P, que cuando se multiplica por un vector, proyecta ese vector ortogonalmente sobre un subespacio específico. Esto significa que el vector resultante se encuentra completamente dentro de ese subespacio y la diferencia entre el vector original y su proyección es ortogonal (perpendicular) al subespacio. Es un concepto central en el estudio de los espacios vectoriales y las transformaciones lineales.
Para que una matriz P sea considerada una matriz de proyección, debe cumplir dos propiedades clave:
- Idempotencia:
P² = P. Esto significa que si aplicamos la proyección una vez, el resultado ya está en el subespacio, y aplicarla de nuevo no cambiará nada. Es como proyectar una sombra sobre la pared: una vez que está en la pared, proyectarla de nuevo sobre la misma pared no la moverá. - Simetría:
Pᵀ = P(para proyecciones ortogonales). Esto indica que la matriz es igual a su traspuesta, lo cual es una característica de las matrices que representan transformaciones ortogonales o que tienen propiedades de "reflexión" en cierto sentido. En el contexto de la proyección ortogonal, la simetría es una propiedad inherente que asegura que la proyección se realiza de la manera más "directa" y sin sesgos.
Estas propiedades no solo definen matemáticamente una matriz de proyección, sino que también revelan su comportamiento intrínseco. La idempotencia, en particular, subraya que una vez que un vector ha sido proyectado, cualquier aplicación posterior de la misma matriz de proyección no alterará su posición, ya que ya reside en el subespacio de destino.
La Fórmula para la Matriz de Proyección Ortogonal
La fórmula más común y fundamental para construir una matriz de proyección ortogonal sobre un subespacio W, que está generado por las columnas de una matriz A, es:
P = A(AᵀA)⁻¹AᵀDesglosemos esta fórmula para entender cada uno de sus componentes:
A: Es una matriz cuyas columnas forman una base para el subespacioWsobre el cual queremos proyectar. Es crucial que las columnas deAsean linealmente independientes; de lo contrario, la matrizAᵀAno sería invertible, invalidando la fórmula. Si las columnas no son linealmente independientes, se pueden usar métodos como la descomposición QR para encontrar una base ortonormal.Aᵀ: Es la traspuesta de la matrizA.AᵀA: Este producto es una matriz cuadrada. Si las columnas deAson linealmente independientes, esta matriz será invertible. Su inversa,(AᵀA)⁻¹, es un componente crítico en la fórmula, ya que "normaliza" las bases y permite la proyección correcta.(AᵀA)⁻¹: La inversa del producto deAtraspuesta porA. Su existencia es lo que garantiza que la proyección sea única y bien definida.
Esta fórmula se deriva del problema de encontrar el vector ŵ en el subespacio W que minimiza la distancia cuadrática al vector original y. En otras palabras, ŵ es la mejor aproximación de y en el subespacio W. La solución a este problema de mínimos cuadrados conduce directamente a la expresión de la matriz P.
Cálculo de la Proyección de un Vector
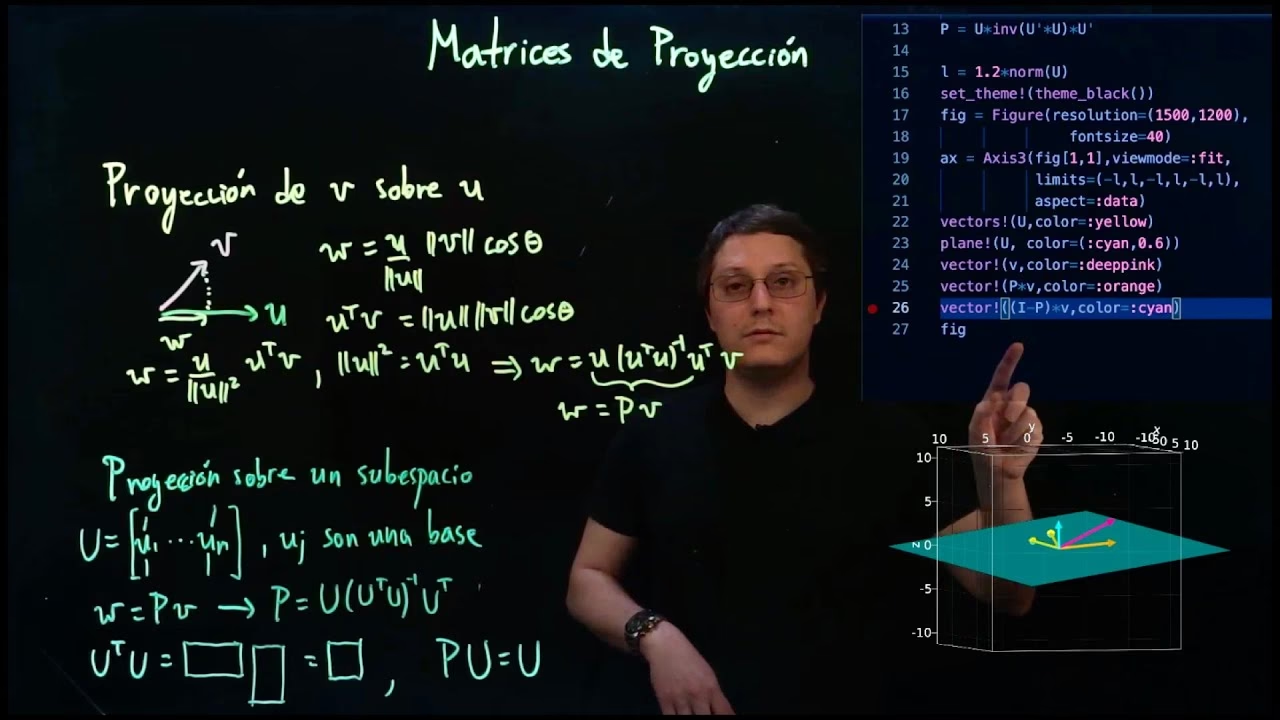
Una vez que hemos calculado la matriz de proyección P para un subespacio W, proyectar cualquier vector v sobre ese subespacio es sorprendentemente sencillo. Simplemente multiplicamos el vector por la matriz de proyección:
Proyección de v sobre W = P * vEl resultado de esta multiplicación es el vector projW(v), que es el componente de v que se encuentra dentro del subespacio W. Este vector projW(v) es el punto más cercano a v que existe en W.
Por ejemplo, si tenemos un vector v = [x, y, z]ᵀ en un espacio tridimensional y queremos proyectarlo sobre un plano (un subespacio bidimensional), primero construiríamos la matriz A con las bases de ese plano. Luego, calcularíamos P = A(AᵀA)⁻¹Aᵀ. Finalmente, multiplicaríamos P por v para obtener la proyección de v sobre el plano. Este proceso es fundamental para tareas como la reducción de ruido en señales o la simplificación de modelos complejos.
Aplicaciones Clave de la Matriz de Proyección
La matriz de proyección no es solo un concepto teórico; tiene numerosas aplicaciones prácticas que impactan directamente en la tecnología y la ciencia moderna. Aquí exploramos algunas de las más significativas:
Regresión por Mínimos Cuadrados
Una de las aplicaciones más importantes y omnipresentes de la matriz de proyección es en el campo de la regresión lineal por mínimos cuadrados. Cuando intentamos ajustar una línea (o un plano o hiperplano) a un conjunto de puntos de datos, lo que realmente estamos haciendo es encontrar la "mejor" línea que minimice la suma de los cuadrados de las distancias entre los puntos de datos reales y los puntos en la línea. Esta "mejor" línea es, de hecho, la proyección de los puntos de datos sobre el subespacio generado por las variables independientes.
En este contexto, la matriz de diseño X de un modelo de regresión lineal (cuyas columnas representan las variables predictoras) actúa como la matriz A en nuestra fórmula de proyección. La matriz de proyección P = X(XᵀX)⁻¹Xᵀ se utiliza para obtener los valores predichos (ŷ = Py) que se encuentran en el espacio de columnas de X, es decir, el subespacio que las variables predictoras pueden "explicar". La diferencia entre los valores observados y y los valores predichos ŷ son los residuos, que son ortogonales al espacio de columnas de X. Esta ortogonalidad es la base del método de mínimos cuadrados, asegurando que los residuos sean tan pequeños como sea posible en el sentido cuadrático.
Reducción de Dimensionalidad
En el análisis de datos, especialmente con conjuntos de datos de alta dimensión, la reducción de dimensionalidad es crucial para la visualización, el procesamiento y la eliminación de ruido. Las matrices de proyección son fundamentales en técnicas como el Análisis de Componentes Principales (PCA). Aunque PCA no calcula directamente una única matriz de proyección de la forma A(AᵀA)⁻¹Aᵀ, su objetivo es encontrar las direcciones (componentes principales) en las que los datos tienen la mayor varianza y luego proyectar los datos sobre el subespacio definido por estas direcciones. Las matrices resultantes de esta transformación son, en esencia, matrices de proyección que mapean los datos originales a un espacio de menor dimensión, conservando la mayor cantidad de información posible.
Además de PCA, existen otros métodos que utilizan matrices de proyección para la reducción de dimensionalidad, como las proyecciones aleatorias. A diferencia de las proyecciones ortogonales deterministas, donde el subespacio se elige para optimizar alguna propiedad (como la varianza en PCA), las proyecciones aleatorias construyen una matriz de proyección A cuyos elementos se generan de forma probabilística (por ejemplo, a partir de una distribución gaussiana de media cero y varianza unitaria, o con valores de -1 o +1 con probabilidad 0.5). La idea detrás de esto es que, con una alta probabilidad, una proyección aleatoria a un espacio de menor dimensión puede preservar las distancias entre los puntos de datos originales hasta un factor de escala. Esto es particularmente útil en escenarios de "maldición de la dimensionalidad" donde los algoritmos tradicionales se vuelven intratables. Aunque la matriz A aquí es una matriz de proyección en el sentido general de mapear un espacio a otro, no cumple necesariamente las propiedades de idempotencia y simetría de una matriz de proyección ortogonal P.
Gráficos por Computadora
En gráficos por computadora, las matrices de proyección son vitales para transformar objetos 3D en imágenes 2D que pueden mostrarse en una pantalla. Se utilizan dos tipos principales de proyección:
- Proyección Ortográfica: Es una proyección paralela, donde los rayos de proyección son paralelos entre sí y perpendiculares al plano de proyección. Se utiliza a menudo para dibujos técnicos, donde la perspectiva no es deseada y las dimensiones deben conservarse. La matriz de proyección ortográfica es una forma de matriz de proyección en el sentido de que colapsa una dimensión (la profundidad) sobre un plano.
- Proyección en Perspectiva: Simula cómo los ojos humanos ven el mundo, donde los objetos más lejanos parecen más pequeños. Los rayos de proyección convergen en un punto (el centro de proyección). Aunque la matriz de perspectiva es más compleja y no es una matriz de proyección en el sentido estricto (no es idempotente ni simétrica), su propósito es similar: mapear puntos de un espacio 3D a un espacio 2D, considerando la profundidad.
Procesamiento de Señales e Imágenes
En el procesamiento de señales e imágenes, las matrices de proyección pueden usarse para filtrar ruido o extraer características específicas. Por ejemplo, en la compresión de imágenes o audio, se puede proyectar la señal original sobre un subespacio de menor dimensión que capture la información más relevante, descartando el ruido o los detalles menos importantes. Esto es el fundamento de muchas técnicas de compresión con pérdida.
Consideraciones y Desafíos
Aunque la matriz de proyección es una herramienta poderosa, su aplicación práctica puede presentar algunos desafíos:
- Invertibilidad de
AᵀA: Como se mencionó, las columnas de la matrizAdeben ser linealmente independientes para queAᵀAsea invertible. Si no lo son, el subespacio está mal definido o las columnas son redundantes, y se requieren métodos alternativos (como la pseudoinversa de Moore-Penrose) para calcular la proyección. - Costo Computacional: Calcular la inversa de
AᵀApuede ser computacionalmente costoso para matrices muy grandes, lo que es común en problemas de big data. En estos casos, se prefieren métodos iterativos o descomposiciones matriciales como la SVD (Singular Value Decomposition) o QR para evitar el cálculo explícito de la inversa.
Preguntas Frecuentes (FAQs)
¿Qué significa que una matriz de proyección sea idempotente (P² = P)?
Significa que aplicar la transformación de proyección una vez es suficiente. Si el vector ya está proyectado sobre el subespacio, aplicarle la matriz de proyección de nuevo no lo moverá. Es una propiedad fundamental que asegura que la operación es un "mapeo a un lugar fijo".
¿La matriz de proyección siempre es simétrica (Pᵀ = P)?
Sí, la matriz de proyección para una proyección ortogonal siempre es simétrica. Esto se debe a la naturaleza de la proyección ortogonal, donde la dirección del "error" (la diferencia entre el vector original y su proyección) es perpendicular al subespacio de proyección. Las matrices simétricas tienen propiedades muy convenientes en álgebra lineal, como tener valores propios reales y vectores propios ortogonales.
¿Cuál es la diferencia entre una matriz de proyección y una matriz de transformación general?
Una matriz de transformación general puede mapear vectores de cualquier manera (rotación, escala, cizallamiento, etc.). Una matriz de proyección es un tipo específico de matriz de transformación que siempre mapea vectores sobre un subespacio particular y, además, cumple con las propiedades de idempotencia (P² = P) y, para proyecciones ortogonales, simetría (Pᵀ = P).
¿Para qué se utiliza la matriz de proyección en la ciencia de datos?
Es fundamental en la regresión por mínimos cuadrados para encontrar la mejor línea de ajuste, en la reducción de dimensionalidad (como en PCA) para simplificar datos complejos y en técnicas de agrupamiento (clustering) mediante proyecciones aleatorias para preservar distancias en espacios de menor dimensión.
¿Es necesario que las columnas de la matriz A sean ortonormales para usar la fórmula P = A(AᵀA)⁻¹Aᵀ?
No, no es estrictamente necesario que sean ortonormales, solo linealmente independientes. Sin embargo, si las columnas de Ason ortonormales, la fórmula se simplifica drásticamente a P = AAᵀ, ya que en ese caso AᵀA se convierte en la matriz identidad, haciendo que su inversa sea también la identidad. Esto reduce significativamente el costo computacional.
Conclusión
La matriz de proyección es una herramienta indispensable en el álgebra lineal, que trasciende la teoría para encontrar aplicaciones prácticas en una multitud de disciplinas. Desde la base de la regresión por mínimos cuadrados hasta la visualización de gráficos 3D y la compleja tarea de la reducción de dimensionalidad en el análisis de grandes volúmenes de datos, su capacidad para "aplanar" la información sobre un subespacio relevante la convierte en un pilar fundamental. Comprender sus fundamentos, su fórmula y sus propiedades no solo enriquece nuestra visión matemática, sino que también nos equipa con una poderosa herramienta para resolver problemas del mundo real y simplificar la complejidad de los datos que nos rodean.
Si quieres conocer otros artículos parecidos a La Matriz de Proyección: Fundamentos y Aplicaciones puedes visitar la categoría Cálculos.