10/07/2024
En el vasto universo de la electrónica, donde las señales se transmiten y procesan constantemente, surge la necesidad imperante de seleccionar y aislar rangos específicos de frecuencias. Aquí es donde los filtros electrónicos, y en particular los filtros paso bajo, juegan un papel crucial. Estos ingeniosos circuitos están diseñados para permitir el paso de señales con frecuencias por debajo de un cierto punto, mientras atenúan o bloquean aquellas que superan ese umbral. Son herramientas fundamentales tanto para ingenieros como para aficionados, permitiendo limpiar señales, dirigir el audio hacia altavoces específicos o incluso transformar formas de onda.
A lo largo de este artículo, desglosaremos la esencia de los filtros paso bajo, explorando sus fórmulas clave, entendiendo su comportamiento y diferenciando entre las configuraciones pasivas y activas. Prepárate para sumergirte en los principios que rigen la selección de frecuencias, desde los componentes más básicos hasta las complejas interacciones que definen el rendimiento de estos vitales dispositivos.
¿Qué es un Filtro Paso Bajo?
Un filtro paso bajo es un circuito electrónico que, como su nombre indica, permite el paso de frecuencias bajas desde 0 Hz hasta una frecuencia de corte específica (fc), mientras que atenúa o bloquea las frecuencias más altas. Su función principal es eliminar señales no deseadas de alta frecuencia, como el ruido, o separar componentes de baja frecuencia de una señal compleja.
Los filtros se clasifican comúnmente en dos tipos principales según los componentes que utilizan y su capacidad de amplificación:
- Filtros Pasivos: Construidos únicamente con componentes pasivos como resistores (R), capacitores (C) e inductores (L). No tienen elementos amplificadores (transistores, amplificadores operacionales) y, por lo tanto, no pueden aumentar la amplitud de la señal; de hecho, siempre la atenúan. Son simples, económicos y no requieren fuente de alimentación externa.
- Filtros Activos: Incorporan elementos amplificadores, típicamente amplificadores operacionales (op-amps), además de resistores y capacitores. Su principal ventaja es que pueden ofrecer ganancia de señal (la salida puede ser mayor que la entrada), aislar etapas y permitir un diseño más flexible de la respuesta en frecuencia. Sin embargo, requieren una fuente de alimentación externa y su rendimiento está limitado por las características del amplificador.
En aplicaciones de baja frecuencia (hasta aproximadamente 100 kHz), los filtros pasivos suelen construirse con redes RC (resistor-capacitor). Para frecuencias más altas (por encima de 100 kHz), se utilizan generalmente componentes RLC (resistor-inductor-capacitor) o filtros activos.
Filtros Pasivos de Primer Orden: El Filtro RC Paso Bajo
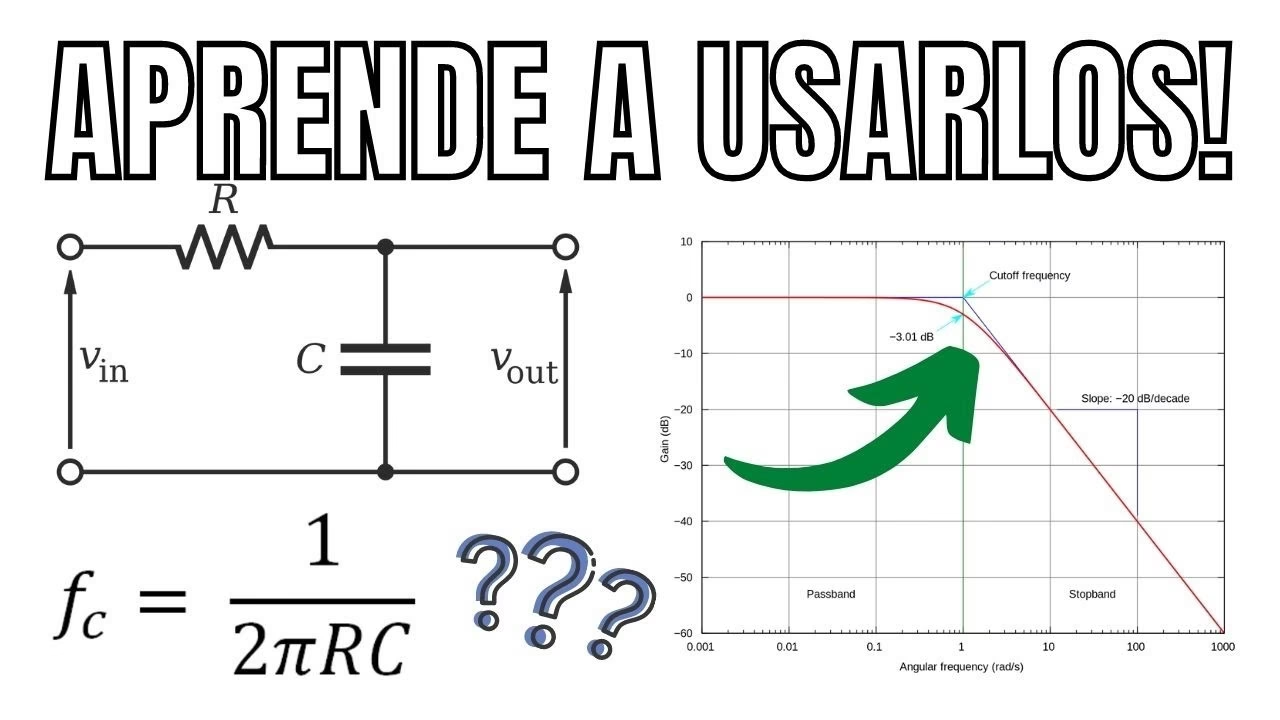
El tipo de filtro paso bajo más sencillo y fundamental es el de primer orden, también conocido como filtro de un polo. Este se construye conectando un único resistor (R) en serie con un único capacitor (C). La señal de entrada (VIN) se aplica a la combinación en serie, y la señal de salida (VOUT) se toma a través del capacitor.
El funcionamiento de este filtro se basa en la propiedad de la reactancia capacitiva (XC), que es la oposición del capacitor al flujo de corriente alterna y que varía inversamente con la frecuencia de la señal. Mientras que el valor de la resistencia (R) permanece constante con la frecuencia, la XC del capacitor cambia significativamente:
- A bajas frecuencias: La reactancia capacitiva (XC) es muy grande en comparación con la resistencia (R). Esto significa que el capacitor actúa casi como un circuito abierto, y la mayor parte del voltaje de entrada cae sobre él, apareciendo en la salida (VOUT).
- A altas frecuencias: La reactancia capacitiva (XC) disminuye drásticamente, volviéndose muy pequeña en comparación con la resistencia (R). El capacitor se comporta casi como un cortocircuito, desviando la señal de alta frecuencia a tierra y haciendo que la mayor parte del voltaje caiga sobre el resistor. En consecuencia, la señal de salida se atenúa considerablemente.
Para entender las fórmulas, podemos ver el filtro RC como un divisor de voltaje dependiente de la frecuencia. La oposición total al flujo de corriente en un circuito de CA se llama impedancia (Z). Para un circuito en serie de resistor y capacitor, la impedancia se calcula como:
Z = √(R² + XC²)
Donde R es la resistencia en Ohmios (Ω) y XC es la reactancia capacitiva en Ohmios (Ω).
La reactancia capacitiva (XC) de un capacitor en un circuito de CA se calcula con la siguiente fórmula:
XC = 1 / (2πfC)
Donde f es la frecuencia de la señal en Hertz (Hz) y C es la capacitancia en Faradios (F).
Utilizando el principio del divisor de voltaje, el voltaje de salida (VOUT) a través del capacitor se puede determinar como:
VOUT = VIN * (XC / Z)
Sustituyendo la expresión de Z y XC, obtenemos:
VOUT = VIN * ( (1 / (2πfC)) / √(R² + (1 / (2πfC))²) )
La Fórmula de la Frecuencia de Corte (fc)
La frecuencia de corte (fc), también conocida como frecuencia de esquina o punto de ruptura, es el punto clave que define el comportamiento de un filtro. En un filtro paso bajo, esta es la frecuencia a la cual la potencia de la señal de salida cae a la mitad de su valor en la banda de paso, o equivalentemente, el voltaje de salida se reduce al 70.7% (o 1/√2) del voltaje de entrada en la banda de paso. Este punto también se conoce como el punto de -3dB, ya que una reducción a 0.707 veces el voltaje original corresponde a -3 decibelios (20 log10(0.707) ≈ -3 dB).
En un filtro RC de primer orden, la frecuencia de corte (fc) se produce cuando la reactancia capacitiva (XC) es igual a la resistencia (R). La fórmula para calcular la frecuencia de corte es:
fc = 1 / (2πRC)
Donde R es la resistencia en Ohmios (Ω) y C es la capacitancia en Faradios (F).
En este punto de frecuencia de corte, la señal de salida también sufre un desfase de -45 grados con respecto a la señal de entrada. La fase de la señal de salida con respecto a la entrada se puede calcular con la fórmula:
Φ = -arctan(f / fc)
O, en términos de R y C:
Φ = -arctan(2πfRC)
Respuesta en Frecuencia y Diagrama de Bode
La respuesta en frecuencia de un filtro se visualiza típicamente mediante un diagrama de Bode, que muestra la ganancia (o atenuación) y el ángulo de fase de la señal de salida en función de la frecuencia. Para un filtro paso bajo de primer orden:
- Banda de Paso: Para frecuencias muy por debajo de fc, la ganancia es casi la unidad (1, o 0dB), lo que significa que la señal pasa prácticamente sin atenuación.
- Frecuencia de Corte (fc): La ganancia es de -3dB (aproximadamente 0.707 veces el voltaje de entrada).
- Banda de Rechazo: Para frecuencias por encima de fc, la ganancia comienza a disminuir a una tasa constante, conocida como “roll-off” o pendiente de atenuación. Para un filtro de primer orden RC, esta pendiente es de -20dB/década (o -6dB/octava). Esto significa que por cada aumento de diez veces en la frecuencia, la señal de salida se reduce en 20 decibelios.
Filtros Paso Bajo de Orden Superior
Aunque un filtro de primer orden es simple y efectivo para muchas aplicaciones, su pendiente de atenuación de -20dB/década puede no ser suficiente para eliminar completamente las señales no deseadas en algunas situaciones. Para lograr una atenuación más pronunciada, se utilizan filtros de orden superior.
Filtros de Segundo Orden
Un filtro paso bajo de segundo orden se puede crear conectando en cascada dos etapas de filtro RC de primer orden. Al añadir más etapas RC, se incrementa el orden del filtro y, con ello, la pendiente de atenuación. Por ejemplo, un filtro de segundo orden tendrá una pendiente de -40dB/década (-12dB/octava), un filtro de tercer orden tendrá -60dB/década, y así sucesivamente (n x -20dB/década, donde 'n' es el orden del filtro). Esto permite que la banda de rechazo del filtro se acerque más a la ideal.
Sin embargo, la cascada de etapas de filtros pasivos idénticos tiene un inconveniente: la ganancia en la frecuencia de corte disminuye a medida que aumenta el orden. La atenuación en fc para filtros pasivos en cascada se puede definir con la siguiente fórmula:
Ganancia en fc = (0.7071)n
Donde 'n' es el número de etapas del filtro. Por ejemplo, para un filtro de segundo orden (n=2), la ganancia en fc sería (0.7071)² ≈ 0.5 (o -6dB) del voltaje de entrada. Además, el punto real de -3dB (la frecuencia de corte efectiva) de un filtro de orden superior construido con etapas idénticas se desplaza ligeramente de la fc calculada para una sola etapa. La frecuencia de corte efectiva (-3dB) para un filtro de orden 'n' con etapas idénticas se puede calcular como:
f-3dB = fc / √(2(1/n) - 1)
Donde fc es la frecuencia de corte calculada para una sola etapa (1/(2πRC)).
¿Qué es la Ganancia de un Filtro Paso Bajo?
La ganancia de un filtro se refiere a la relación entre la amplitud de la señal de salida y la amplitud de la señal de entrada. Es un parámetro crucial que determina si el filtro atenúa o amplifica la señal.
Filtros Pasivos: Ganancia Inferior a la Unidad
Como se mencionó, los filtros pasivos no contienen elementos amplificadores. Por lo tanto, su ganancia siempre será menor que la unidad (es decir, VOUT < VIN). La señal siempre se atenúa, y la ganancia máxima que pueden ofrecer es 1 (o 0dB) en la banda de paso ideal, pero en la práctica, debido a la carga y las imperfecciones, suele ser ligeramente inferior a 1.
Filtros Activos: Con Amplificación
Los filtros activos superan la limitación de ganancia de los filtros pasivos al incorporar dispositivos amplificadores como los amplificadores operacionales (op-amps). Esto les permite no solo filtrar sino también amplificar la señal, logrando una ganancia mayor que la unidad. Las ventajas de los filtros activos incluyen:
- Amplificación de Señal: La señal de salida puede ser más fuerte que la de entrada.
- Aislamiento de Carga: La alta impedancia de entrada del op-amp minimiza la carga en la etapa de filtro, mientras que su baja impedancia de salida evita que la frecuencia de corte del filtro se vea afectada por los cambios en la impedancia de la carga.
- Mayor Flexibilidad en el Diseño: Permiten una conformación más precisa de la respuesta en frecuencia y la obtención de pendientes de atenuación más pronunciadas con menos componentes reactivos.
La ganancia de un filtro activo de primer orden (con un op-amp en configuración no inversora) en la banda de paso (AF) se define por la red de resistores en su bucle de retroalimentación:
AF = 1 + R2/R1
Donde R1 y R2 son los resistores que configuran la ganancia del amplificador.
La ganancia de un filtro activo de primer orden en función de la frecuencia (Av) se calcula como:
Av = AF / √(1 + (f / fc)²)
Donde f es la frecuencia de la señal de entrada y fc es la frecuencia de corte.
La ganancia de un filtro, o de cualquier circuito, se expresa comúnmente en decibelios (dB), lo que permite manejar un amplio rango de valores de forma más compacta:
Ganancia (dB) = 20 * log10 (VOUT / VIN)
La Constante de Tiempo (τ)
En el contexto de los filtros RC, la constante de tiempo (τ, tau) es un parámetro fundamental que describe la velocidad a la que el capacitor se carga o descarga a través del resistor. Esta constante de tiempo está directamente relacionada con la frecuencia de corte del filtro:
τ = RC
Donde R es la resistencia en Ohmios (Ω) y C es la capacitancia en Faradios (F). La constante de tiempo se mide en segundos.
La relación entre la constante de tiempo y la frecuencia de corte es inversa:
fc = 1 / (2πτ)
Esto significa que un valor más grande de RC (una constante de tiempo más larga) resultará en una frecuencia de corte más baja, y viceversa.
La constante de tiempo es especialmente relevante cuando el filtro se somete a señales que cambian abruptamente, como una onda cuadrada. En tales casos, un filtro paso bajo RC puede actuar como un integrador, convirtiendo una señal de onda cuadrada en una forma de onda triangular, ya que el capacitor se carga y descarga gradualmente.
Calculadoras de Filtros RC
El diseño de filtros RC, aunque conceptualmente sencillo, a menudo implica la selección de valores de componentes estándar y la verificación de la frecuencia de corte resultante. Para simplificar este proceso, existen numerosas calculadoras de filtros RC en línea. Estas herramientas permiten a los usuarios ingresar dos de los tres valores (R, C, o fc) y calcular el tercero, facilitando el diseño de filtros paso bajo o paso alto de forma rápida y precisa. Son de gran ayuda para prototipos y diseños rápidos, asegurando que los componentes elegidos se ajusten a la respuesta de frecuencia deseada.
Filtros LC Pasivos
Aunque este artículo se ha centrado en los filtros RC, es importante mencionar los filtros LC pasivos. Estos filtros utilizan inductores (L) y capacitores (C) para sus propiedades de filtrado. A diferencia de los filtros RC, los filtros LC son más eficientes y se utilizan comúnmente en aplicaciones de radiofrecuencia (RF) o donde se requiere una selectividad de frecuencia muy precisa y una menor pérdida de energía en la banda de paso. Son excelentes para bloquear ruido específico o para sintonizar circuitos resonantes, pero su diseño puede ser más complejo debido a las características de los inductores.
Aplicaciones de los Filtros Paso Bajo
Los filtros paso bajo son omnipresentes en la electrónica moderna. Algunas de sus aplicaciones más comunes incluyen:
- Sistemas de Audio: Para dirigir las señales de baja frecuencia (graves) a los altavoces de graves (woofers) en sistemas de sonido, o para eliminar el ruido de alta frecuencia (silbido) de una señal de audio. En este contexto, a veces se les llama filtros de “corte de agudos” o “corte alto”.
- Procesamiento de Señales: Para suavizar señales, eliminar el ruido de alta frecuencia en sensores o sistemas de adquisición de datos.
- Fuentes de Alimentación: Para eliminar el rizado de alta frecuencia en la salida de rectificadores.
- Integradores: En el dominio del tiempo, un filtro RC paso bajo con una constante de tiempo larga puede funcionar como un circuito integrador, convirtiendo señales cuadradas en triangulares.
- Sistemas de Control: Para promediar valores o eliminar fluctuaciones rápidas en señales de control.
Algunas palabras importantes a resaltar en este artículo incluyen: Filtro Paso Bajo, Frecuencia de Corte, Reactancia Capacitiva, Componentes Pasivos, y Ganancia.
Tabla Comparativa: Filtros Paso Bajo Pasivos vs. Activos
| Característica | Filtro Pasivo | Filtro Activo |
|---|---|---|
| Componentes Principales | Resistores (R), Capacitores (C), Inductores (L) | Resistores (R), Capacitores (C), Amplificadores Operacionales (Op-amps) |
| Capacidad de Amplificación | No amplifica; siempre atenúa la señal (Ganancia < 1) | Puede amplificar la señal (Ganancia ≥ 1) |
| Fuente de Alimentación | No requiere fuente de alimentación externa | Requiere fuente de alimentación externa |
| Impedancia de Carga | Las características se ven afectadas por la impedancia de la carga | Menos afectado por la impedancia de carga (aislamiento por el op-amp) |
| Complejidad del Diseño | Generalmente más simple para filtros de primer orden | Más complejo en diseño, pero ofrece mayor flexibilidad y rendimiento |
| Costo | Generalmente más económico | Generalmente más costoso debido al op-amp y fuente de alimentación |
| Pendiente de Atenuación | Limitada por el orden del filtro (ej. -20dB/década por polo) | Puede lograr pendientes más pronunciadas con menos componentes reactivos |
| Respuesta en Frecuencia | Más susceptible a variaciones por tolerancia de componentes | Más precisa y controlable, con menos ruido cuando bien diseñado |
Preguntas Frecuentes sobre Filtros Paso Bajo
¿Cuál es la fórmula principal para calcular la frecuencia de corte de un filtro paso bajo RC?
La fórmula principal para calcular la frecuencia de corte (fc) de un filtro paso bajo RC es: fc = 1 / (2πRC). Aquí, R representa la resistencia en Ohmios (Ω), C es la capacitancia en Faradios (F), y fc es la frecuencia resultante en Hertz (Hz).
¿Cómo se calcula un filtro RC en la práctica?
Para calcular un filtro RC, primero debe determinar la frecuencia de corte deseada (fc). Luego, elija un valor estándar disponible para uno de los componentes (ya sea R o C). Con la fórmula de la frecuencia de corte, puede despejar el valor del componente restante. Por ejemplo, si elige un resistor R, el capacitor C se calcularía como: C = 1 / (2πRfc). Posteriormente, seleccione el valor estándar de capacitor más cercano. Las calculadoras online de filtros RC son herramientas muy útiles para agilizar este proceso de diseño y prueba.
¿Qué es la ganancia de un filtro paso bajo y cómo se diferencia en filtros pasivos y activos?
La ganancia de un filtro es la relación entre la amplitud de la señal de salida y la amplitud de la señal de entrada. En los filtros paso bajo pasivos, la ganancia siempre es menor a la unidad (o 0 dB en la escala logarítmica) porque no incluyen elementos amplificadores, lo que significa que la señal de salida siempre estará atenuada en comparación con la entrada. Por el contrario, los filtros paso bajo activos incorporan componentes amplificadores (como amplificadores operacionales) y, por lo tanto, pueden tener una ganancia mayor a la unidad, lo que permite que la señal de salida sea amplificada.
¿Qué significa el punto de -3dB en la respuesta de un filtro?
El punto de -3dB (decibelios) en la respuesta de un filtro es un estándar de la industria que define la frecuencia de corte (fc). En este punto, la potencia de la señal de salida se ha reducido a la mitad de la potencia de la señal de entrada en la banda de paso. En términos de voltaje, esto significa que el voltaje de salida es aproximadamente el 70.7% del voltaje de entrada. Es el umbral donde el filtro comienza a atenuar significativamente la señal.
¿Qué es el 'roll-off' o pendiente de atenuación de un filtro?
El 'roll-off' o pendiente de atenuación describe la velocidad a la que la ganancia de un filtro disminuye a medida que la frecuencia se aleja de la frecuencia de corte en la banda de rechazo. Se mide típicamente en decibelios por década (dB/década) o decibelios por octava (dB/octava). Un filtro de primer orden tiene un 'roll-off' de -20dB/década, mientras que un filtro de segundo orden tiene -40dB/década, y así sucesivamente. Una pendiente más pronunciada indica una atenuación más efectiva de las frecuencias no deseadas.
¿Qué es un filtro LC pasivo?
Un filtro LC pasivo es un tipo de filtro electrónico que utiliza inductores (L) y capacitores (C) como sus principales componentes para filtrar frecuencias. A diferencia de los filtros RC, que son más comunes en aplicaciones de baja frecuencia, los filtros LC son particularmente útiles en frecuencias más altas (por encima de 100 kHz) y en situaciones donde se requiere una alta selectividad y una mínima pérdida de energía en la banda de paso. Se utilizan a menudo para bloquear ruido específico, en circuitos de sintonización y en fuentes de alimentación.
En resumen, los filtros paso bajo son herramientas esenciales en el diseño electrónico, permitiéndonos esculpir el espectro de frecuencias de las señales. Desde los simples filtros RC pasivos que atenúan la señal, hasta los complejos filtros activos que pueden amplificarla y ofrecer una mayor precisión, la comprensión de sus fórmulas y principios de funcionamiento es clave para cualquier proyecto electrónico. Ya sea para limpiar una señal de audio o para integrar una forma de onda, el dominio de los filtros paso bajo abre un mundo de posibilidades en el control y procesamiento de señales.
Si quieres conocer otros artículos parecidos a Filtro Paso Bajo: Fórmulas y Funcionamiento Esencial puedes visitar la categoría Cálculos.