05/05/2025
En un mundo cada vez más automatizado y conectado, la capacidad de medir distancias de forma precisa es fundamental para innumerables aplicaciones. Desde sistemas de estacionamiento en automóviles hasta robots que navegan por entornos complejos o dispositivos que detectan el nivel de líquidos en un tanque, los sensores de distancia juegan un papel crucial. Entre ellos, los sensores ultrasónicos destacan por su versatilidad, economía y fiabilidad en una amplia gama de escenarios. Pero, ¿cómo logran estos ingeniosos dispositivos calcular la distancia a un objeto con tanta eficacia? La respuesta reside en un principio físico fundamental y una fórmula matemática sencilla pero poderosa.
- El Principio Detrás de la Medición: El Tiempo de Vuelo (ToF)
- La Fórmula Fundamental para el Cálculo de la Distancia
- Un Ejemplo Práctico: El Sensor HC-SR04
- Factores que Afectan la Precisión y Limitaciones
- Mejorando la Fiabilidad de las Mediciones Ultrasónicas
- Ultrasónicos vs. Otros Sensores de Distancia: Una Comparativa
- Aplicaciones Comunes de los Sensores Ultrasónicos
- Preguntas Frecuentes (FAQ)
- ¿Cuál es la diferencia principal entre un sensor ultrasónico y uno infrarrojo (IR)?
- ¿A qué distancia mínima y máxima puede medir un sensor ultrasónico típico como el HC-SR04?
- ¿Cómo afecta la temperatura a la precisión de la medición ultrasónica?
- ¿Los sensores ultrasónicos son adecuados para detectar objetos pequeños o transparentes?
- ¿Se pueden usar los sensores ultrasónicos en entornos ruidosos?
- Conclusión
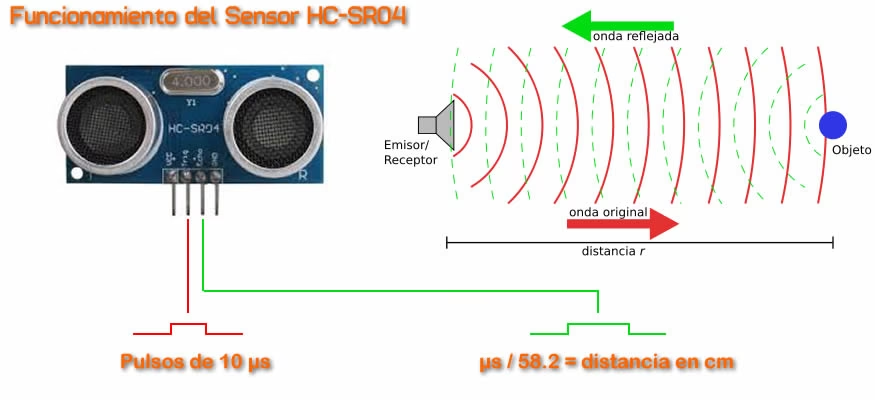
El Principio Detrás de la Medición: El Tiempo de Vuelo (ToF)
Los sensores ultrasónicos operan bajo el principio del Tiempo de Vuelo (Time of Flight o ToF). Este método se basa en la emisión de una onda sonora y la medición del tiempo que tarda esa onda en viajar, reflejarse en un objeto y regresar al sensor. Imagínelo como el eco que escucharía si gritara en una cueva; el tiempo que tarda el eco en volver le daría una idea de cuán grande es la cueva.
El proceso se desarrolla en varias etapas:
- Emisión del Pulso: El sensor cuenta con un transductor (o emisor) que genera un pulso de sonido de alta frecuencia, generalmente en el rango de los 40 kHz (inaudible para el oído humano). Este pulso viaja a través del aire.
- Reflexión en el Objeto: Cuando el pulso ultrasónico encuentra un objeto en su camino, rebota en su superficie, creando un eco.
- Recepción del Eco: El mismo transductor, o un receptor separado, detecta el eco de la onda sonora que regresa.
- Medición del Tiempo: El sensor mide con precisión el tiempo transcurrido desde que se emitió el pulso original hasta que se recibió el eco. Este es el 'tiempo de vuelo' total.
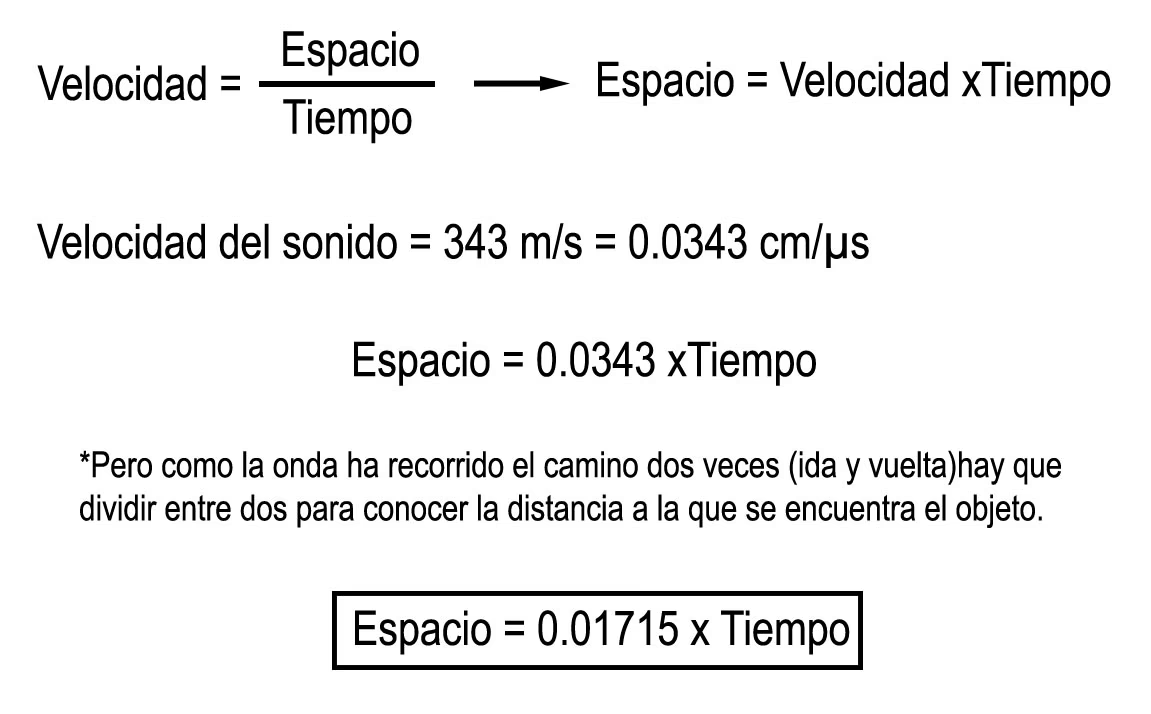
Es crucial entender que este tiempo medido corresponde al viaje de ida y vuelta de la onda sonora. Para determinar la distancia real al objeto, solo necesitamos la mitad de ese tiempo, ya que la onda recorre la distancia dos veces: una para ir al objeto y otra para volver al sensor.
La Fórmula Fundamental para el Cálculo de la Distancia
Una vez que el sensor ha medido el tiempo de vuelo (T), el cálculo de la distancia (L) se convierte en una simple operación matemática. La fórmula utilizada es la siguiente:
L = (T × C) / 2
Donde:
- L es la distancia al objeto (la que queremos calcular).
- T es el tiempo total transcurrido desde la emisión del pulso hasta la recepción del eco (el 'tiempo de vuelo' medido por el sensor).
- C es la velocidad del sonido en el medio (en este caso, el aire).
- El divisor 2 se aplica porque, como mencionamos, el sonido viaja la distancia dos veces (ida y vuelta).
La velocidad del sonido (C) en el aire no es una constante fija, sino que varía ligeramente con factores como la temperatura, la humedad y la presión atmosférica. A una temperatura ambiente de 20°C (68°F), la velocidad del sonido en el aire seco es aproximadamente 343 metros por segundo (m/s). Para cálculos más precisos en sistemas embebidos, a menudo se usa un valor en unidades más pequeñas, como centímetros por microsegundo (cm/µs). Por ejemplo, 343 m/s equivale a 0.0343 cm/µs. Conocer y compensar estas variaciones es fundamental para lograr una alta precisión en las mediciones.
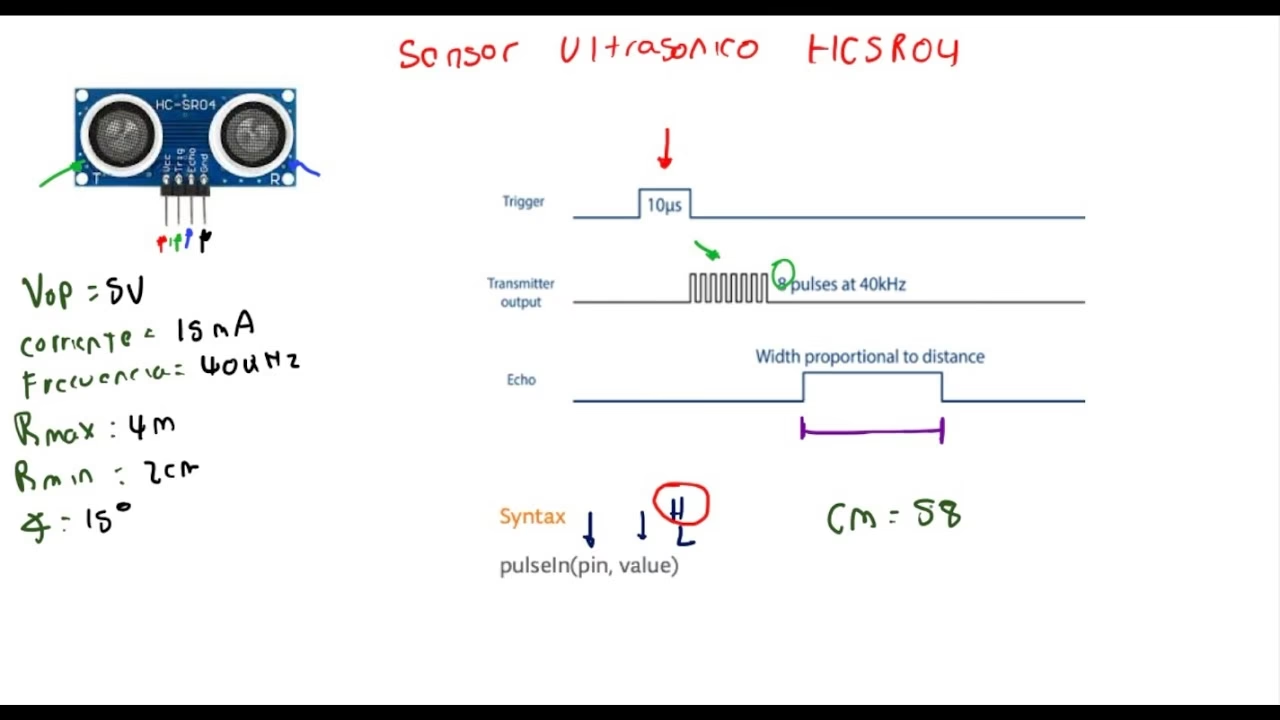
Un Ejemplo Práctico: El Sensor HC-SR04
Uno de los sensores ultrasónicos más populares y accesibles en el mundo de la electrónica y la robótica es el HC-SR04. Este sensor encapsula el principio de funcionamiento que hemos descrito y lo hace fácilmente integrable con microcontroladores como Arduino.
El HC-SR04 cuenta con cuatro pines principales:
- Vcc: Alimentación (generalmente 5V).
- GND: Tierra.
- TRIG (Trigger): Pin de disparo. Se le envía un pulso corto (generalmente de 10 microsegundos) para que el sensor emita la onda ultrasónica.
- ECHO: Pin de eco. Este pin se pone en alto cuando el pulso es emitido y vuelve a bajo cuando el eco es recibido. El microcontrolador mide la duración de este pulso alto para obtener el tiempo de vuelo.
El proceso con un microcontrolador (como Arduino) sería el siguiente:
- Se configura el pin TRIG como salida y el pin ECHO como entrada.
- Para iniciar una medición, se envía un pulso alto de 10 µs al pin TRIG y luego se baja.
- El sensor emite un pulso ultrasónico.
- El microcontrolador espera que el pin ECHO se ponga en alto y, una vez que lo hace, comienza a medir el tiempo.
- Cuando el eco es recibido, el pin ECHO vuelve a bajo. El microcontrolador detiene la medición del tiempo. La duración de este estado alto del pin ECHO es nuestro 'T'.
- Finalmente, se aplica la fórmula
distancia = (tiempo_transcurrido * velocidad_sonido) / 2para obtener la distancia en la unidad deseada (por ejemplo, centímetros si la velocidad del sonido está en cm/µs).
Por ejemplo, si el microcontrolador mide que el pin ECHO estuvo en alto durante 580 microsegundos (T = 580 µs) y la velocidad del sonido (C) es de 0.0343 cm/µs, la distancia se calcularía como:
L = (580 µs * 0.0343 cm/µs) / 2 = 19.894 cm / 2 = 9.947 cm.
Esto significa que el objeto se encuentra aproximadamente a 10 centímetros del sensor.
Factores que Afectan la Precisión y Limitaciones
Aunque los sensores ultrasónicos son herramientas muy útiles, no están exentos de limitaciones y factores que pueden influir en la precisión de sus mediciones. Es importante conocerlos para seleccionar el sensor adecuado y diseñar sistemas robustos:
- Ruido Ambiental: Fuentes de sonido externas en la misma frecuencia que el sensor (40 kHz) o ecos de otras superficies pueden interferir con la señal, generando lecturas erróneas.
- Material y Forma del Objeto: Las superficies blandas (como telas o alfombras) tienden a absorber el sonido en lugar de reflejarlo, lo que dificulta la detección. Objetos con formas irregulares, inclinadas o cóncavas pueden dispersar el sonido, haciendo que el eco no regrese directamente al sensor. Objetos muy pequeños o transparentes al sonido también pueden ser difíciles de detectar.
- Objetos en Movimiento: Para objetos que se mueven rápidamente, el tiempo de vuelo puede no ser representativo de la posición en el momento del cálculo, introduciendo errores o inestabilidad en las lecturas.
- Rango de Distancia: Todos los sensores ultrasónicos tienen un rango mínimo y máximo de operación. Para distancias muy cercanas, el pulso puede rebotar y volver antes de que el sensor haya terminado de emitirlo, o el eco puede ser demasiado fuerte. Para distancias muy lejanas, el pulso puede disiparse antes de regresar, o el eco ser demasiado débil para ser detectado.
- Variaciones Ambientales: Como se mencionó, la velocidad del sonido cambia con la temperatura y, en menor medida, con la humedad y la presión atmosférica. Una variación de temperatura de unos pocos grados puede alterar la velocidad del sonido lo suficiente como para introducir errores significativos en la distancia calculada si no se compensa.
- Campo de Visión (Ángulo de Visión): Los sensores ultrasónicos emiten un cono de sonido, no un haz estrecho. Esto significa que detectarán el objeto más cercano dentro de ese cono. La forma y el ángulo de este cono (campo de visión) pueden variar entre modelos y deben considerarse para evitar detecciones no deseadas.
Mejorando la Fiabilidad de las Mediciones Ultrasónicas
A pesar de las limitaciones, existen técnicas para mejorar la fiabilidad y precisión de los sensores ultrasónicos:
- Filtros de Datos: Implementar filtros en el software del microcontrolador. Un filtro de mediana, por ejemplo, toma varias muestras consecutivas (ej. 3 o 5) y devuelve la muestra del medio, ayudando a eliminar picos de ruido aislados. Esto aumenta la estabilidad de las lecturas a expensas de una menor frecuencia de muestreo.
- Calibración de la Velocidad del Sonido: Para aplicaciones críticas, se puede incluir un sensor de temperatura para ajustar dinámicamente el valor de la velocidad del sonido en la fórmula, compensando las variaciones térmicas.
- Múltiples Sensores: En entornos complejos, el uso de múltiples sensores ultrasónicos o la combinación con otros tipos de sensores puede proporcionar una imagen más completa y robusta del entorno.
- Consideraciones de Diseño: Ubicar el sensor lejos de fuentes de ruido sonoro, asegurar que el camino del sonido esté despejado y considerar la orientación del sensor con respecto a los objetos a detectar.
Ultrasónicos vs. Otros Sensores de Distancia: Una Comparativa
Los sensores ultrasónicos son solo una de las muchas tecnologías disponibles para medir distancias. Otros métodos populares incluyen los sensores infrarrojos (IR), LiDAR, VCSEL y RADAR, cada uno con sus propias ventajas y desventajas. Entender estas diferencias es clave para elegir la herramienta adecuada para cada aplicación.
| Tipo de Sensor | Principio de Funcionamiento | Rango Típico | Precisión | Sensibilidad a Luz/Material | Costo (aprox.) | Aplicaciones Comunes |
|---|---|---|---|---|---|---|
| Ultrasónico | Tiempo de Vuelo (ondas sonoras) | Corto a Medio (cm a ~10m) | Media | Baja a luz, media a material/forma | Bajo | Evitación de obstáculos, nivel de líquidos, robótica |
| Infrarrojo (IR) | Señal Reflejada / Triangulación (luz IR) | Muy Corto (cm a ~1m) | Baja | Alta a luz ambiental, media a color/reflectividad | Muy Bajo | Proximidad, detección de presencia, autofocus |
| LiDAR | Tiempo de Vuelo (pulsos láser) | Medio a Largo (metros a km) | Muy Alta | Baja a luz, media a material/transparencia | Alto | Vehículos autónomos, topografía, cartografía 3D |
| VCSEL | Tiempo de Vuelo (láser de cavidad vertical) | Corto a Medio (cm a ~4m) | Muy Alta | Baja a luz, media a material | Medio-Alto | Smartphones (autofocus, Face ID), drones |
| RADAR | Tiempo de Vuelo (ondas de radio) | Muy Largo (metros a km) | Media-Alta | Baja a luz/material (penetra niebla, lluvia) | Muy Alto | Automoción (ADAS), control de tráfico, meteorología |
Como se observa en la tabla, los sensores ultrasónicos ofrecen un equilibrio atractivo entre costo y rendimiento para muchas aplicaciones donde la alta precisión de milímetros no es estrictamente necesaria y el entorno de luz no es un problema. Su inmunidad a las condiciones de luz ambiental es una ventaja significativa sobre los sensores basados en luz (IR, LiDAR) en ciertos escenarios.
Aplicaciones Comunes de los Sensores Ultrasónicos
La simplicidad de su funcionamiento y su bajo costo han llevado a los sensores ultrasónicos a ser adoptados en una amplia variedad de aplicaciones:
- Robótica: Son omnipresentes en robots móviles para la evitación de obstáculos y la navegación básica.
- Sistemas de Estacionamiento: Utilizados en vehículos para medir la distancia a objetos cercanos al estacionar, alertando al conductor sobre posibles colisiones.
- Medición de Nivel: Ideales para medir el nivel de líquidos (agua, combustible) o materiales granulados en tanques y silos, ya que no requieren contacto directo con el medio.
- Automatización Industrial: Detección de presencia de objetos en líneas de producción, conteo de piezas o posicionamiento.
- Domótica y Seguridad: Detección de movimiento o presencia en sistemas de alarma o control de iluminación.
- Proyectos de Hobby y Educación: Debido a su facilidad de uso y bajo costo, son un componente básico en proyectos de electrónica para principiantes y entusiastas.
Preguntas Frecuentes (FAQ)
¿Cuál es la diferencia principal entre un sensor ultrasónico y uno infrarrojo (IR)?
La principal diferencia radica en el tipo de onda que utilizan para medir la distancia. Los sensores ultrasónicos emplean ondas sonoras de alta frecuencia, mientras que los sensores infrarrojos utilizan luz infrarroja. Esto tiene implicaciones en su rendimiento: los ultrasónicos son menos afectados por las condiciones de luz ambiental y pueden detectar objetos transparentes al IR, mientras que los IR suelen ser más pequeños y rápidos, pero sensibles a la luz y al color/reflectividad del objeto.
¿A qué distancia mínima y máxima puede medir un sensor ultrasónico típico como el HC-SR04?
El HC-SR04 tiene un rango de medición típico de aproximadamente 2 cm a 400 cm (4 metros). Sin embargo, el rendimiento puede variar según el entorno y la superficie del objeto. Para distancias mayores, existen sensores ultrasónicos industriales que pueden alcanzar varias decenas de metros.
¿Cómo afecta la temperatura a la precisión de la medición ultrasónica?
La temperatura es el factor ambiental que más afecta la velocidad del sonido en el aire. A mayor temperatura, el sonido viaja más rápido. Si el sensor no compensa esta variación, una lectura de tiempo de vuelo se traducirá en una distancia calculada incorrecta. Por ejemplo, una diferencia de 10°C puede generar un error de varios centímetros en distancias de un metro.
¿Los sensores ultrasónicos son adecuados para detectar objetos pequeños o transparentes?
Los objetos muy pequeños pueden ser difíciles de detectar si no presentan una superficie lo suficientemente grande para reflejar el eco de vuelta al sensor. En cuanto a los objetos transparentes, si son transparentes al sonido (algo poco común en objetos sólidos cotidianos, más relacionado con gases o líquidos), no se detectarán. Sin embargo, los objetos transparentes a la luz (como el cristal o algunos plásticos) sí suelen reflejar el sonido, por lo que un sensor ultrasónico puede detectarlos, a diferencia de muchos sensores IR o LiDAR que fallarían.
¿Se pueden usar los sensores ultrasónicos en entornos ruidosos?
Los entornos con mucho ruido sonoro en la misma frecuencia que el sensor ultrasónico pueden afectar negativamente su rendimiento. Sin embargo, los ruidos sonoros audibles (de baja frecuencia) generalmente no interfieren con las ondas ultrasónicas de 40 kHz. En entornos industriales muy ruidosos, pueden ser necesarios filtros de software o el uso de sensores con un ancho de haz más estrecho y mayor potencia.
Conclusión
Los sensores ultrasónicos son una maravilla de la ingeniería que simplifican la compleja tarea de medir distancias. Basados en el simple, pero efectivo, principio del tiempo de vuelo y la fórmula L = (T × C) / 2, estos dispositivos han encontrado su lugar en una multitud de aplicaciones, desde la robótica de consumo hasta la automatización industrial. Aunque poseen ciertas limitaciones, entender su funcionamiento y las técnicas para mitigar sus debilidades permite explotar al máximo su potencial. Su combinación de bajo costo, facilidad de uso e inmunidad a las condiciones de luz los convierte en una opción inigualable para muchas necesidades de detección de distancia.
Si quieres conocer otros artículos parecidos a ¿Cómo calcula la distancia un sensor ultrasónico? puedes visitar la categoría Calculadoras.