09/05/2023
En el vasto universo del álgebra lineal, existen conceptos fundamentales que actúan como pilares para comprender la estructura y el comportamiento de las funciones vectoriales. Uno de estos conceptos cruciales es el núcleo de una transformación lineal, también conocido como kernel. Si alguna vez te has preguntado cómo ciertos vectores se 'anulan' bajo una transformación o qué significa realmente que una función sea 'inyectiva' en el contexto vectorial, estás en el lugar correcto. Este artículo te guiará a través de la definición, el cálculo y la profunda relevancia del núcleo, desmitificando uno de los temas más intrigantes del álgebra lineal.
Comprender el núcleo no es solo un ejercicio teórico; tiene implicaciones prácticas en campos como la computación gráfica, la ingeniería, la física e incluso la criptografía, donde las transformaciones lineales son herramientas esenciales para modelar sistemas y manipular datos. Acompáñanos en este viaje para desentrañar el corazón de las transformaciones lineales y equiparte con el conocimiento para calcular su núcleo de manera efectiva.
- ¿Qué es el Núcleo (Kernel) de una Transformación Lineal?
- La Importancia del Núcleo en el Álgebra Lineal
- ¿Cómo Calcular el Núcleo de una Transformación Lineal?
- Paso 1: Identificar la Matriz de la Transformación
- Paso 2: Plantear el Sistema de Ecuaciones Homogéneo
- Paso 3: Resolver el Sistema Usando Reducción por Filas
- Paso 4: Expresar las Variables Básicas en Términos de las Variables Libres
- Paso 5: Escribir la Solución General y Encontrar una Base
- Ejemplo Práctico: Cálculo del Núcleo
- La Dimensión del Núcleo (Nulidad) y el Teorema del Rango-Nulidad
- Núcleo vs. Imagen: Una Comparativa Esencial
- Preguntas Frecuentes (FAQ) sobre el Núcleo
- ¿El núcleo de una transformación lineal siempre contiene al vector nulo?
- ¿Qué significa que el núcleo de una transformación lineal sea solo el vector nulo?
- ¿Cómo se relaciona el núcleo con la solución de sistemas de ecuaciones lineales?
- ¿Es lo mismo núcleo que espacio nulo?
- ¿Puede el núcleo de una transformación lineal tener dimensión cero?
- Conclusión
¿Qué es el Núcleo (Kernel) de una Transformación Lineal?
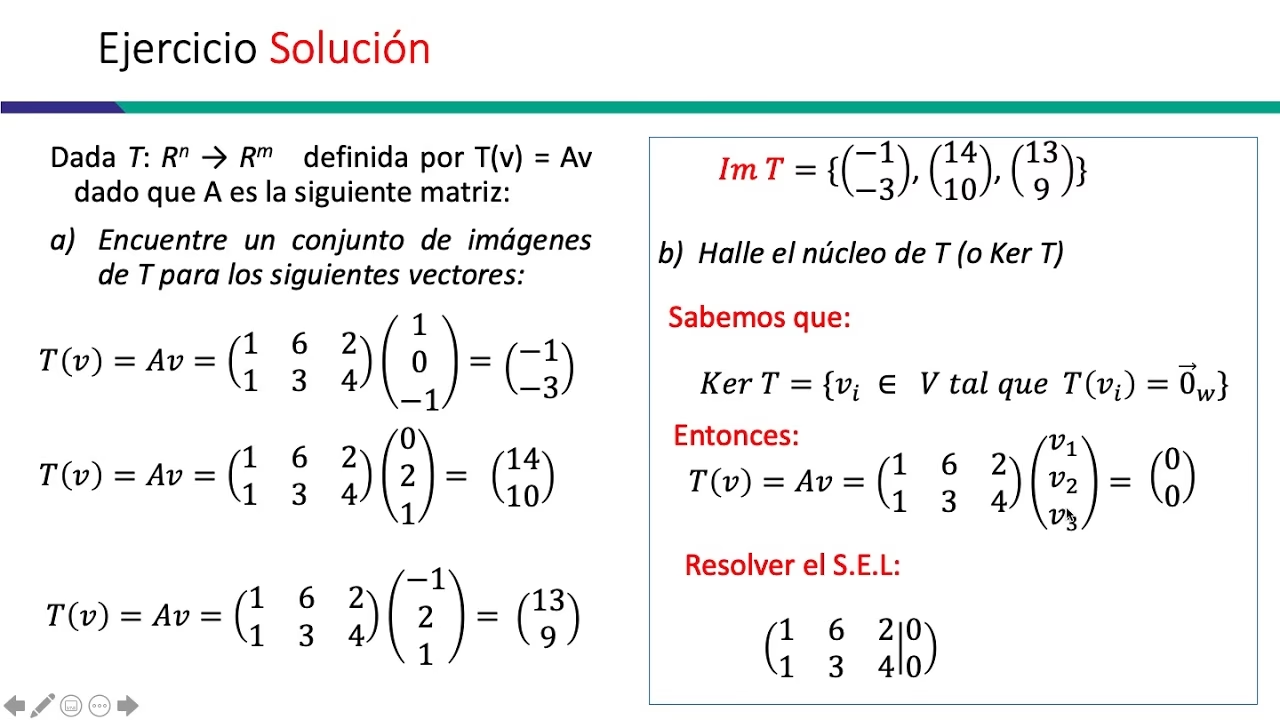
El núcleo de una transformación lineal T, denotado comúnmente como ker(T) o N(T), es el conjunto de todos los vectores en el espacio de entrada (dominio) que son mapeados al vector nulo del espacio de salida (codominio) por dicha transformación. En términos más formales, si T: V → W es una transformación lineal, entonces el núcleo de T se define como:
ker(T) = {v ∈ V | T(v) = 0_W}
Donde 0_W representa el vector nulo en el espacio W. Es crucial entender que el núcleo siempre incluye al vector nulo del espacio de entrada (0_V), ya que toda transformación lineal mapea el vector nulo del dominio al vector nulo del codominio (T(0_V) = 0_W). Esto significa que el núcleo nunca es un conjunto vacío.
Más allá de una simple colección de vectores, el núcleo posee una propiedad matemática muy importante: es un subespacio vectorial del espacio de entrada V. Esto implica que cumple con las tres condiciones clave para ser un subespacio:
- Contiene al vector nulo.
- Es cerrado bajo la suma de vectores (si v1 y v2 están en el núcleo, entonces v1 + v2 también está).
- Es cerrado bajo la multiplicación por un escalar (si v está en el núcleo y c es un escalar, entonces c*v también está).
Estas propiedades lo convierten en una estructura algebraica robusta y significativa para el análisis de transformaciones.
La Importancia del Núcleo en el Álgebra Lineal
El núcleo no es solo una definición abstracta; es un concepto con profundas implicaciones que revela mucho sobre la naturaleza de una transformación lineal. Su estudio nos permite entender:
Inyectividad de una Transformación Lineal
Una de las aplicaciones más directas del núcleo es determinar si una transformación lineal es inyectiva (o uno a uno). Una transformación T es inyectiva si y solo si su núcleo contiene únicamente al vector nulo. Es decir, si ker(T) = {0_V}, entonces cada vector distinto en el dominio se mapea a un vector distinto en el codominio. Si el núcleo contiene vectores no nulos, significa que múltiples vectores del dominio son mapeados al mismo vector nulo en el codominio, lo que rompe la condición de inyectividad.
La Estructura de la Solución de Sistemas Lineales
El núcleo está intrínsecamente relacionado con la solución de sistemas de ecuaciones lineales homogéneos (Ax = 0). De hecho, el núcleo de la transformación lineal asociada a una matriz A es precisamente el espacio solución de este sistema homogéneo. Esto es fundamental porque nos dice que las soluciones no triviales (no nulas) del sistema homogéneo forman un subespacio vectorial.
El Teorema del Rango-Nulidad
Este teorema es una de las joyas del álgebra lineal y conecta la dimensión del núcleo con la dimensión de la imagen (rango) de una transformación lineal. Lo exploraremos en detalle más adelante, pero baste decir que el núcleo es una pieza clave para entender cómo el dominio de una transformación se 'divide' entre lo que se mapea a cero y lo que se proyecta en la imagen.
¿Cómo Calcular el Núcleo de una Transformación Lineal?
El proceso para calcular el núcleo de una transformación lineal es sistemático y se basa en la resolución de un sistema de ecuaciones lineales homogéneo. A continuación, detallamos el método general y un ejemplo práctico.
Paso 1: Identificar la Matriz de la Transformación
Toda transformación lineal T: V → W puede ser representada por una matriz A, siempre que V y W sean espacios vectoriales de dimensión finita con bases dadas. Si la transformación se da explícitamente (ej., T(x,y) = (x+y, 2x-y)), el primer paso es construir su matriz asociada. Si ya tienes la matriz, este paso se omite.
Paso 2: Plantear el Sistema de Ecuaciones Homogéneo
Recordando la definición del núcleo, buscamos todos los vectores v en V tales que T(v) = 0_W. Si A es la matriz de la transformación y v es un vector columna de variables, esto se traduce en resolver el sistema de ecuaciones matricial:
A * v = 0
Donde 0 es el vector columna nulo en el espacio de salida.
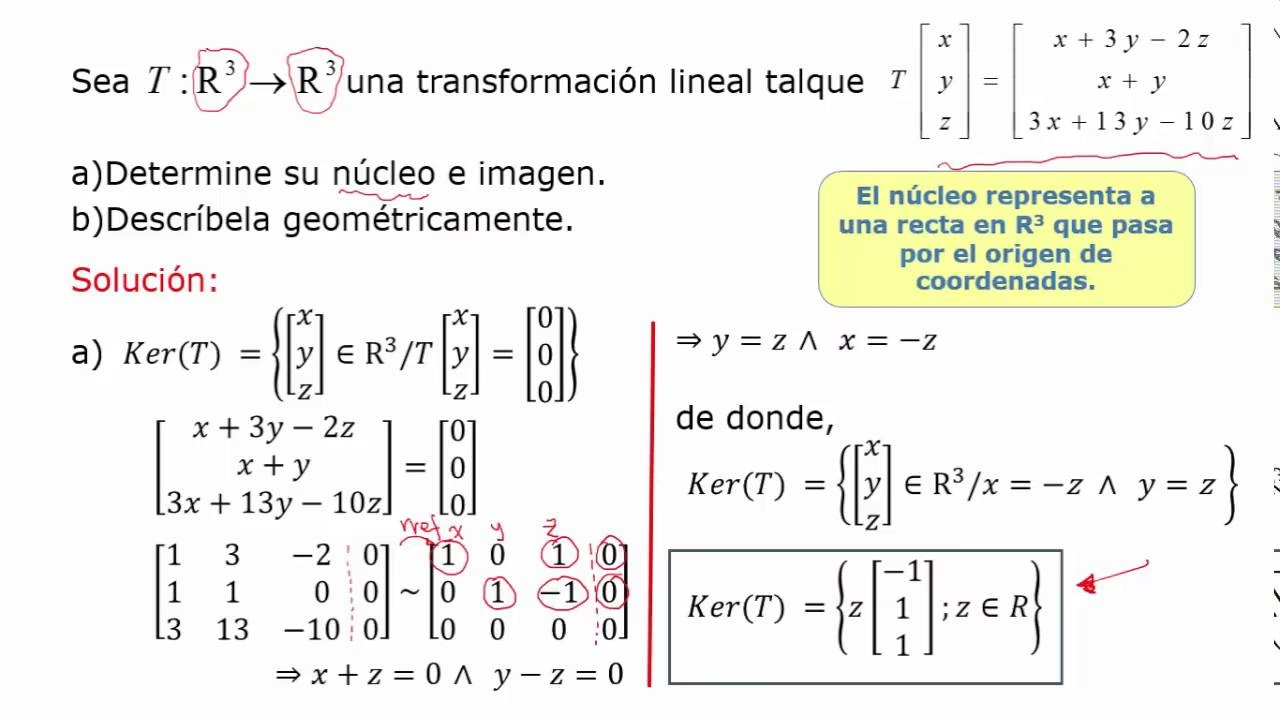
Paso 3: Resolver el Sistema Usando Reducción por Filas
Para encontrar los vectores v que satisfacen A * v = 0, utilizamos el método de eliminación de Gauss-Jordan. Esto implica llevar la matriz aumentada [A | 0] a su forma escalonada reducida por filas (RREF). Aunque la columna de ceros en el lado derecho no cambiará durante las operaciones de fila, es útil visualizarla.
Paso 4: Expresar las Variables Básicas en Términos de las Variables Libres
Una vez que la matriz está en su forma escalonada reducida, identificamos las variables básicas (aquellas con pivotes) y las variables libres (aquellas sin pivotes). Expresamos las variables básicas en términos de las variables libres. Si no hay variables libres, el único vector en el núcleo es el vector nulo.
Paso 5: Escribir la Solución General y Encontrar una Base
La solución general obtenida en el paso anterior describe todos los vectores en el núcleo. Para encontrar una base para el núcleo, separamos la solución en una combinación lineal donde cada variable libre es un escalar. Los vectores resultantes de esta separación formarán una base para el núcleo.
Ejemplo Práctico: Cálculo del Núcleo
Consideremos la transformación lineal T: ℝ³ → ℝ² definida por:
T(x, y, z) = (x + 2y - z, 2x + 4y - 2z)
1. Matriz de la Transformación:
La matriz A asociada a T es:
A = [[1, 2, -1], [2, 4, -2]]2. Plantear el Sistema Homogéneo:
Buscamos (x, y, z) tal que T(x, y, z) = (0, 0). Esto es equivalente a A * [x, y, z]^T = [0, 0]^T:
[1 2 -1] [x] [0] [2 4 -2] [y] = [0] [z]3. Resolver por Reducción por Filas:
La matriz aumentada es:
[1 2 -1 | 0] [2 4 -2 | 0]Aplicamos la operación de fila F2 ← F2 - 2*F1:
[1 2 -1 | 0] [0 0 0 | 0]La matriz ya está en su forma escalonada reducida.
4. Expresar Variables Básicas en Términos de Variables Libres:
De la primera fila, obtenemos la ecuación: 1x + 2y - 1z = 0. Aquí, x es la variable básica, y y y z son las variables libres. Despejamos x:
x = -2y + z
5. Escribir la Solución General y la Base:
Cualquier vector (x, y, z) en el núcleo debe satisfacer esta relación. Podemos escribir la solución general como:
(x, y, z) = (-2y + z, y, z)
Ahora, separamos los términos que dependen de y y los que dependen de z:
(x, y, z) = (-2y, y, 0) + (z, 0, z)
Factorizamos las variables libres:
(x, y, z) = y*(-2, 1, 0) + z*(1, 0, 1)
Los vectores (-2, 1, 0) y (1, 0, 1) son linealmente independientes y generan el núcleo de T. Por lo tanto, una base para el núcleo de T es:
B_ker(T) = {(-2, 1, 0), (1, 0, 1)}
La Dimensión del Núcleo (Nulidad) y el Teorema del Rango-Nulidad
La dimensión del núcleo de una transformación lineal T, denotada como dim(ker(T)) o nulidad(T), es simplemente el número de vectores en una base para el núcleo. En el ejemplo anterior, la nulidad de T es 2, ya que encontramos dos vectores en su base.
Este valor es fundamental para el Teorema del Rango-Nulidad, que establece una relación profunda entre la dimensión del dominio, la dimensión del núcleo y la dimensión de la imagen (rango) de una transformación lineal. El teorema dice que para una transformación lineal T: V → W, donde V es un espacio vectorial de dimensión finita:
dim(V) = dim(ker(T)) + dim(Im(T))
Donde:
dim(V)es la dimensión del espacio de entrada (dominio).dim(ker(T))es la nulidad de T (dimensión del núcleo).dim(Im(T))es el rango de T (dimensión de la imagen o espacio columna de la matriz asociada).
Retomando nuestro ejemplo, T: ℝ³ → ℝ², tenemos:
dim(V) = dim(ℝ³) = 3- Calculamos
dim(ker(T)) = 2
Aplicando el teorema del rango-nulidad, podemos encontrar la dimensión de la imagen:
3 = 2 + dim(Im(T))
dim(Im(T)) = 1
Esto significa que la imagen de la transformación es un subespacio de ℝ² de dimensión 1 (una línea que pasa por el origen), lo cual es consistente con el rango de la matriz A, que también es 1 (solo tiene una fila/columna pivote). El teorema del rango-nulidad es una herramienta poderosa para verificar cálculos y entender la estructura global de las transformaciones lineales.
Núcleo vs. Imagen: Una Comparativa Esencial
Mientras que el núcleo se centra en lo que se mapea a cero, la imagen (o rango) de una transformación lineal T: V → W, denotada Im(T) o R(T), es el conjunto de todos los vectores en el espacio de salida W que son el resultado de aplicar T a algún vector en el espacio de entrada V. Es decir, Im(T) = {w ∈ W | w = T(v) para algún v ∈ V}. La imagen es un subespacio de W.
Ambos conceptos son complementarios y cruciales para entender el comportamiento de T. Aquí una breve comparación:
| Característica | Núcleo (ker(T)) | Imagen (Im(T)) |
|---|---|---|
| Definición | Vectores en el dominio que mapean al vector nulo. | Vectores en el codominio que son el resultado de la transformación. |
| Espacio al que pertenece | Subespacio del dominio (V). | Subespacio del codominio (W). |
| Inyectividad | Si ker(T) = {0}, T es inyectiva. | No directamente relacionado con la inyectividad, sino con la suprayectividad (si Im(T) = W, T es suprayectiva). |
| Cálculo | Resolviendo Ax = 0. | Encontrando una base para el espacio columna de A. |
| Dimensión | Nulidad (número de variables libres). | Rango (número de pivotes en la RREF de A). |
| Relación clave | Teorema del Rango-Nulidad: dim(V) = nulidad(T) + rango(T). | Teorema del Rango-Nulidad: dim(V) = nulidad(T) + rango(T). |
Preguntas Frecuentes (FAQ) sobre el Núcleo
¿El núcleo de una transformación lineal siempre contiene al vector nulo?
Sí, absolutamente. Por definición, toda transformación lineal mapea el vector nulo del dominio al vector nulo del codominio. Por lo tanto, el vector nulo del dominio siempre pertenece al núcleo, lo que garantiza que el núcleo nunca es un conjunto vacío y siempre es un subespacio vectorial.
¿Qué significa que el núcleo de una transformación lineal sea solo el vector nulo?
Si el núcleo de una transformación lineal T es solo el vector nulo (es decir, ker(T) = {0_V}), significa que la transformación es inyectiva. Esto implica que cada vector distinto en el dominio se mapea a un vector distinto en el codominio. No hay dos vectores diferentes en el dominio que se 'colapsen' en el mismo vector nulo en el codominio.
¿Cómo se relaciona el núcleo con la solución de sistemas de ecuaciones lineales?
El núcleo de la matriz asociada a un sistema de ecuaciones lineales Ax = b está directamente relacionado con la solución del sistema homogéneo asociado Ax = 0. El conjunto de todas las soluciones del sistema homogéneo Ax = 0 es precisamente el núcleo de la matriz A. Si x_p es una solución particular de Ax = b, entonces la solución general de Ax = b es x_p + ker(A), es decir, la solución particular más cualquier vector del núcleo.
¿Es lo mismo núcleo que espacio nulo?
Sí, los términos "núcleo" y "espacio nulo" son sinónimos y se usan indistintamente en el contexto del álgebra lineal. Ambos se refieren al conjunto de vectores que una matriz o una transformación lineal mapea al vector nulo. "Kernel" es el término en inglés que también se usa con frecuencia.
¿Puede el núcleo de una transformación lineal tener dimensión cero?
Sí, si el núcleo de una transformación lineal es solo el vector nulo (ker(T) = {0_V}), entonces su dimensión es cero. Esto ocurre cuando la transformación es inyectiva, como se mencionó anteriormente. Una dimensión de cero significa que la base del núcleo es un conjunto vacío, y el único elemento es el vector nulo.
Conclusión
El núcleo de una transformación lineal es mucho más que un simple conjunto de vectores; es una ventana hacia la comprensión profunda de cómo operan las transformaciones en los espacios vectoriales. Desde su definición como el conjunto de vectores que se 'anulan', hasta su papel crucial en la determinación de la inyectividad y su conexión con el poderoso teorema del rango-nulidad, el núcleo es un concepto indispensable en el álgebra lineal. Dominar su cálculo y comprender su significado no solo fortalecerá tus habilidades matemáticas, sino que también te abrirá puertas a una apreciación más profunda de las estructuras subyacentes en numerosos campos científicos y tecnológicos. Esperamos que este artículo haya desmitificado el núcleo y te impulse a seguir explorando las fascinantes propiedades de las transformaciones lineales.
Si quieres conocer otros artículos parecidos a Dominando el Núcleo de una Transformación Lineal puedes visitar la categoría Cálculos.