02/12/2023
La convolución es una operación matemática fundamental que aparece en una asombrosa variedad de campos, desde el procesamiento de señales y el análisis de sistemas hasta el aprendizaje automático y el procesamiento de imágenes. En esencia, la convolución describe cómo la forma de una función se modifica por otra, o cómo la “salida” de un sistema se ve afectada por su “entrada” a lo largo del tiempo o el espacio. Es una herramienta poderosa para entender la interacción entre dos elementos o procesos.
Imagínese que tiene una señal de audio (su entrada) y desea saber cómo sonará después de pasar por un eco (su sistema). La convolución le daría la respuesta. O, en el mundo de las imágenes, si quiere difuminar una foto o detectar sus bordes, la convolución es la operación detrás de ello. A menudo se describe como una “mezcla” o “superposición ponderada” de dos funciones. Profundicemos en los detalles de cómo se calcula y por qué es tan relevante.
- ¿Qué es y Cómo se Calcula la Convolución?
- Convolución Lineal Usando la Transformada de Fourier Discreta (DFT)
- Convolución en el Procesamiento de Imágenes
- Propiedades Clave de la Convolución
- El Teorema de Convolución y la Eficiencia
- Tabla Comparativa: Convolución Continua vs. Discreta
- Preguntas Frecuentes sobre la Convolución
- Conclusión
¿Qué es y Cómo se Calcula la Convolución?
La convolución es una integral (para funciones continuas) o una suma (para funciones discretas) que expresa la cantidad de superposición de una función cuando se desplaza sobre otra. Su resultado es una nueva función que representa la “mezcla” de las dos funciones originales. La notación común para la convolución de dos funciones, f y g, es f * g.
Convolución en el Dominio del Tiempo Continuo
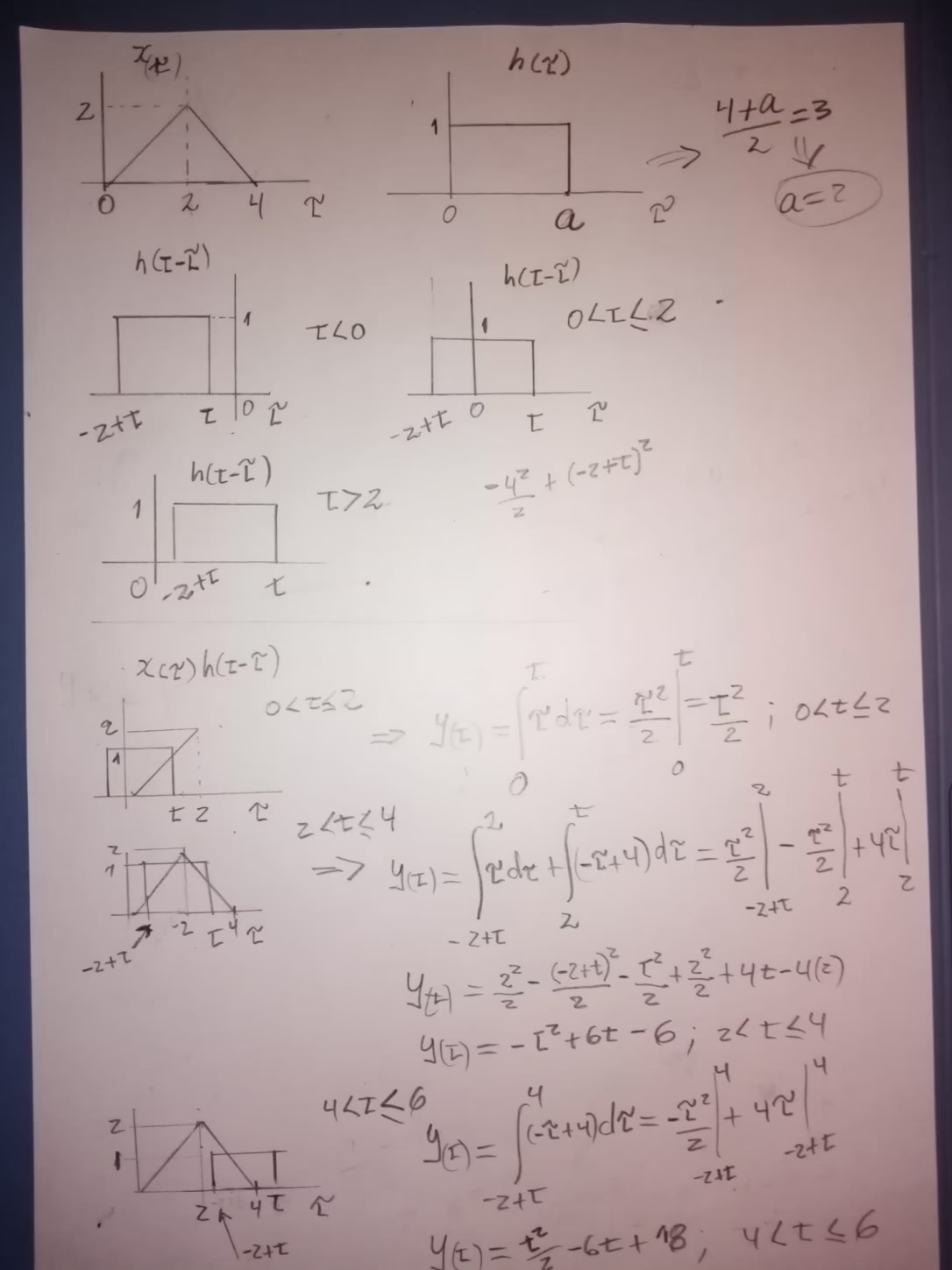
Para funciones continuas f(t) y g(t), la fórmula de la convolución es:
(f * g)(t) = ∫ f(τ)g(t-τ) dτ
Aquí, τ (tau) es una variable ficticia de integración. Para calcularla, una de las funciones (g(t) en este caso) se invierte en el tiempo (g(-τ)) y luego se desplaza por t (g(t-τ)). Después, se multiplica por la otra función (f(τ)) y se integra sobre todo el rango de τ. Este proceso se repite para cada valor de t para obtener la función de convolución resultante.
Un caso particular muy importante, mencionado en la información proporcionada, es la convolución con la función delta de Dirac δ(t). La función delta de Dirac es un pulso idealizado de duración infinitesimal y amplitud infinita, cuya integral es 1. Se verifica que:
f(t) * δ(t - T) = f(t - T)
Esta propiedad es crucial porque muestra que la convolución de una función con un pulso desplazado simplemente desplaza la función original. Esto es fundamental para entender cómo los sistemas lineales e invariantes en el tiempo (LTI) responden a cualquier entrada si conocemos su respuesta a un impulso (su “respuesta impulsional”).
Convolución en el Dominio Discreto
Para secuencias discretas f[n] y g[n] (donde n representa un índice de tiempo o espacio), la fórmula de la convolución lineal es:
(f * g)[n] = Σ f[k]g[n-k]
Similar al caso continuo, una de las secuencias (g[n]) se invierte (g[-k]), se desplaza (g[n-k]), se multiplica elemento a elemento por la otra secuencia (f[k]) y se suman todos los productos para cada valor de n.
Convolución Lineal Usando la Transformada de Fourier Discreta (DFT)
Aunque la convolución se puede calcular directamente mediante las sumatorias o integrales, para señales e imágenes grandes, este cálculo puede ser computacionalmente muy costoso. Aquí es donde entra en juego el teorema de convolución y la Transformada de Fourier Discreta (DFT).
El teorema de convolución establece que la convolución en el dominio del tiempo o espacio es equivalente a la multiplicación en el dominio de la frecuencia. Es decir, DFT{f * g} = DFT{f} ⋅ DFT{g} (donde ⋅ denota la multiplicación puntual). Esto significa que, en lugar de realizar una convolución compleja, podemos:
- Transformar ambas funciones al dominio de la frecuencia usando la DFT.
- Multiplicar sus transformadas elemento a elemento.
- Aplicar la Transformada de Fourier Inversa (IDFT) al resultado para volver al dominio del tiempo/espacio.
La Transformada Rápida de Fourier (FFT) es un algoritmo eficiente para calcular la DFT, lo que acelera enormemente este proceso.
El Desafío del “Wraparound” y el Relleno de Ceros
Sin embargo, hay un detalle crucial: la multiplicación directa de las DFT de dos funciones finitas (como imágenes) resulta en una convolución *cíclica*, no *lineal*. La convolución cíclica introduce un “error de wraparound” o “aliasing espacial”, donde las partes de la señal que se desbordan por un lado reaparecen por el otro, corrompiendo el resultado.
Para obtener la convolución lineal utilizando la DFT, es necesario modificar las funciones originales mediante el relleno de ceros (zero-padding). Esto implica expandir las funciones (o imágenes) originales con ceros hasta un tamaño adecuado. Al rellenar con ceros, se asegura que los productos que causarían el error de wraparound sean cero, eliminando su contribución a la suma de convolución.
El tamaño correcto al que deben ser rellenadas las funciones f (de dimensiones M × N) y h (de dimensiones P × Q) para calcular su convolución lineal g = f * h es (M + P − 1) × (N + Q − 1). Al rellenar ambas funciones a estas dimensiones antes de aplicar la DFT y la multiplicación, la IDFT resultante contendrá la convolución lineal correcta sin errores de wraparound.
En muchas aplicaciones de procesamiento de imágenes, donde una imagen grande se convoluciona con un filtro pequeño (M ≫ P y N ≫ Q), el resultado de la convolución lineal no es mucho más grande que la imagen original. A menudo, solo se retiene la porción del resultado que corresponde al tamaño de la imagen original.
Convolución en el Procesamiento de Imágenes
En el procesamiento de imágenes, la convolución es la operación principal para aplicar filtros y realizar diversas transformaciones. Se utiliza para tareas como:
- Desenfoque (Blurring): Reduce el ruido y suaviza la imagen.
- Aumento de Nitidez (Sharpening): Realza los bordes y detalles.
- Detección de Bordes: Identifica los contornos y límites en una imagen.
- Relieve (Embossing): Crea la ilusión de profundidad.
Todo esto se logra seleccionando el kernel (también conocido como matriz de convolución o filtro) apropiado. Un kernel es una pequeña matriz de números que se “desliza” sobre la imagen.
El Proceso Paso a Paso para Imágenes
Para calcular la convolución G = F * W de una imagen F y un kernel W, se sigue una “receta” específica:
- Invertir el Kernel: Se “refleja” el kernel
Wen el origen para obtenerW^m[i,j] = W[-i,-j]. Aunque en la práctica, muchas implementaciones de software ya manejan esto o usan kernels simétricos. - Desplazar el Kernel: El kernel invertido (o su versión no invertida, dependiendo de la convención) se coloca sobre cada píxel
(i,j)de la imagen. - Multiplicar y Sumar: Para cada posición, se multiplican los valores del kernel por los valores de los píxeles de la imagen que cubre, y luego se suman todos esos productos. El resultado de esta suma es el nuevo valor del píxel central
(i,j)en la imagen de salidaG. - Repetir: Este proceso se repite para cada píxel de la imagen de entrada, generando la imagen de salida convolucionada.
Los píxeles en los bordes de la imagen presentan un desafío, ya que el kernel no puede cubrir completamente la región. Para manejar esto, existen diferentes “modos” de borde (por ejemplo, rellenar con ceros, reflejar los bordes, repetir el último píxel, etc.), que pueden influir en el resultado en esas áreas.
Kernels Separables
Algunos kernels bidimensionales son “separables”, lo que significa que pueden descomponerse en dos convoluciones unidimensionales: una a lo largo de las filas y otra a lo largo de las columnas. Por ejemplo, un kernel uniforme de 5x5 puede obtenerse convolucionando un kernel de 1x5 (horizontal) con un kernel de 5x1 (vertical). Esto es una optimización importante, ya que realizar dos convoluciones 1D suele ser mucho más rápido que una única convolución 2D para kernels grandes.
Función de Respuesta al Impulso
Un hecho notable es que si se convoluciona una imagen que es completamente cero excepto en un punto (donde tiene un valor de 1, un “impulso”) con un kernel, el resultado es el propio kernel desplazado a la posición del impulso. Esto es útil para verificar que una función de convolución está haciendo lo que se supone que debe hacer, ya que la salida debería ser una copia del kernel.
Propiedades Clave de la Convolución
La operación de convolución posee varias propiedades matemáticas importantes que la hacen muy útil:
- Conmutatividad: El orden de las funciones no importa:
f * g = g * f. - Asociatividad: Al convolucionar tres o más funciones, el agrupamiento no importa:
(f * g) * h = f * (g * h). - Distributividad: La convolución se distribuye sobre la suma:
f * (g + h) = (f * g) + (f * h). - Elemento Identidad: La función delta de Dirac (o su equivalente discreto, el impulso unitario) actúa como elemento identidad bajo la convolución:
f * δ = f.
Es importante notar que, si bien estas propiedades son verdaderas en la teoría matemática, las implementaciones prácticas en software (especialmente cuando se manejan los bordes de las imágenes finitas) pueden no exhibir estas propiedades de manera estricta en las zonas fronterizas.
El Teorema de Convolución y la Eficiencia
Como se mencionó, el teorema de convolución es un pilar fundamental en el procesamiento de señales y sistemas. La capacidad de transformar una operación de convolución (que es intensiva en multiplicaciones y sumas) en una simple multiplicación en el dominio de la frecuencia, y luego volver al dominio original, es una de las mayores ventajas computacionales de la convolución.
Esto es especialmente cierto para señales o imágenes de gran tamaño. Mientras que una convolución directa podría requerir un número cuadrático de operaciones (o incluso más para 2D), el enfoque basado en FFT reduce significativamente la complejidad, haciéndola factible para aplicaciones en tiempo real y grandes conjuntos de datos.
Tabla Comparativa: Convolución Continua vs. Discreta
| Característica | Convolución Continua | Convolución Discreta |
|---|---|---|
| Dominio | Funciones analógicas (tiempo, espacio) | Secuencias de muestras (tiempo discreto, píxeles) |
| Operación Matemática | Integral | Sumatoria |
| Notación | f(t) * g(t) | f[n] * g[n] |
| Fórmula General | ∫ f(τ)g(t-τ) dτ | Σ f[k]g[n-k] |
| Aplicaciones Típicas | Análisis de sistemas analógicos, física teórica | Procesamiento digital de señales, imágenes, audio |
| Uso con DFT/FFT | Indirecto (a través de la Transformada de Fourier) | Directo (a través de la Transformada de Fourier Discreta, relleno de ceros esencial) |
Preguntas Frecuentes sobre la Convolución
¿Por qué es tan importante la convolución?
La convolución es fundamental porque modela cómo un sistema responde a una entrada. Permite analizar y diseñar filtros, detectar características en datos (como bordes en imágenes), y es la base de muchas técnicas en campos como la ingeniería, la física, la estadística y la informática. Es el lenguaje para describir cómo se “mezclan” o “impactan” dos funciones entre sí.
¿Qué es un "kernel" en convolución de imágenes?
En el contexto del procesamiento de imágenes, un kernel (también llamado matriz de convolución o filtro) es una pequeña matriz de números que define la operación de convolución. Cada número en el kernel es un “peso” que se aplica a los píxeles vecinos de la imagen para calcular el nuevo valor de un píxel. Diferentes kernels logran diferentes efectos, como desenfoque, nitidez o detección de bordes.
¿Cuál es la diferencia entre convolución lineal y cíclica?
La convolución lineal es la operación estándar que modela cómo se superponen dos señales de manera “abierta”, resultando en una señal de salida que es más larga que las entradas. La convolución cíclica (o circular) ocurre cuando las señales se tratan como si fueran periódicas, lo que significa que el final de la señal se conecta con el principio. Esto puede causar “errores de wraparound” si se usa para simular una convolución lineal. Para obtener una convolución lineal usando métodos basados en FFT (que por naturaleza son cíclicos), es necesario aplicar el relleno de ceros.
¿Cómo mejora la FFT el cálculo de la convolución?
La Transformada Rápida de Fourier (FFT) acelera drásticamente el cálculo de la convolución para señales o imágenes grandes. En lugar de realizar la convolución directamente en el dominio del tiempo o espacio (que tiene una complejidad computacional alta), el teorema de convolución permite transformar las señales al dominio de la frecuencia usando la FFT, multiplicar las transformadas (una operación mucho más rápida), y luego usar la FFT inversa para volver al dominio original. Esto reduce la complejidad de manera significativa, haciendo viables cálculos que de otro modo serían prohibitivos.
¿Dónde más se usa la convolución aparte de imágenes y señales?
La convolución tiene aplicaciones en diversos campos: en la estadística y probabilidad, para calcular la distribución de la suma de variables aleatorias independientes; en la inteligencia artificial y el aprendizaje profundo, en las redes neuronales convolucionales (CNNs) para extraer características de los datos; en la geofísica, para analizar datos sísmicos; y en muchas áreas de la ingeniería para el diseño de filtros y el análisis de sistemas.
Conclusión
La convolución es una operación matemática de gran alcance que subyace en numerosos avances tecnológicos y científicos. Su capacidad para describir la interacción entre sistemas y señales la convierte en una herramienta indispensable en el procesamiento de señales, el análisis de sistemas y, de manera muy destacada, en el procesamiento de imágenes. Comprender cómo se calcula, tanto en el dominio continuo como discreto, y cómo las técnicas como el relleno de ceros y el teorema de convolución facilitan su computación eficiente, es clave para cualquier persona que trabaje con datos y sistemas complejos. Desde la mejora de la calidad de una foto hasta la predicción del comportamiento de un circuito electrónico, la convolución sigue siendo un concepto central y poderoso en el mundo de los cálculos.
Si quieres conocer otros artículos parecidos a ¿Cómo Calcular la Convolución? Guía Completa puedes visitar la categoría Matemáticas.