29/03/2025
En el vasto universo de las matemáticas, especialmente en la geometría y el cálculo multivariable, la capacidad de describir la orientación de una superficie o un plano es fundamental. Aquí es donde entra en juego el concepto de vector normal. Un vector normal es, por definición, un vector perpendicular a una superficie o a una línea en un punto dado. Su importancia trasciende las aulas, encontrando aplicaciones cruciales en campos tan diversos como la física, la ingeniería, la computación gráfica (para la iluminación y el sombreado de objetos 3D) y la robótica.
Este artículo te guiará a través de los diferentes métodos y conceptos para hallar y calcular un vector normal, desde superficies parametrizadas complejas hasta simples triángulos y planos definidos por ecuaciones. Entenderás no solo 'cómo' se calcula, sino también 'por qué' es tan relevante.
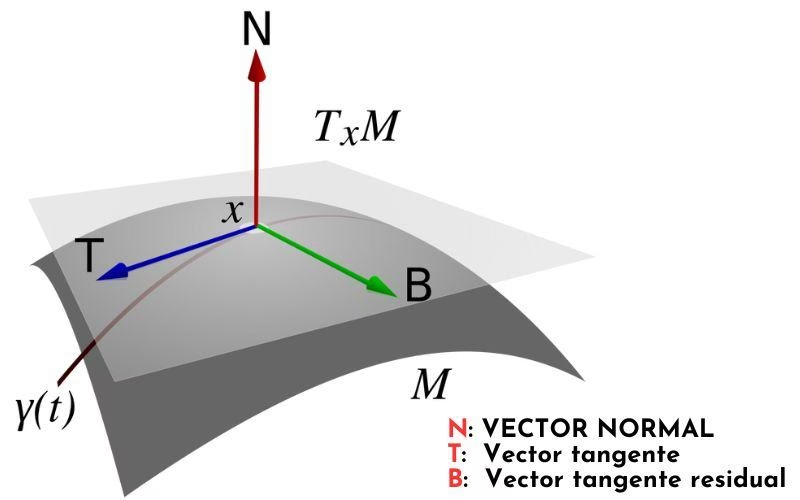
Concepto Fundamental: ¿Qué es un Vector Normal?
Imagina una mesa perfectamente plana. Un vector normal a esa mesa sería cualquier flecha que apunte directamente hacia arriba o directamente hacia abajo, siendo completamente perpendicular a la superficie de la mesa. En términos más formales, un vector normal (también conocido como vector de dirección normal) es un vector que es ortogonal (perpendicular) a una superficie en un punto específico. Esta cualidad de perpendicularidad es lo que lo hace tan útil para definir la orientación espacial.
La dirección del vector normal es crucial. Para una superficie cerrada, como una esfera, el vector normal puede apuntar hacia 'afuera' o hacia 'adentro'. La elección de la dirección a menudo depende del contexto de la aplicación, pero típicamente se estandariza para apuntar hacia el exterior de una superficie cerrada.
El Vector Normal en Superficies Parametrizadas: La Base del Cálculo de Áreas
Cuando trabajamos con superficies que se definen mediante parámetros, como las que encontramos en el cálculo de áreas superficiales, el vector normal emerge de forma natural. Una superficie parametrizada se puede representar mediante un vector de posición r(u,v), donde 'u' y 'v' son los parámetros.
Para calcular el área de una superficie parametrizada, a menudo se aproxima cada pequeño segmento de la superficie como un paralelogramo. Este paralelogramo está 'tensado' por dos vectores: la derivada parcial del vector de posición con respecto a 'u' (∂r/∂u) y la derivada parcial del vector de posición con respecto a 'v' (∂r/∂v). Estos dos vectores, ∂r/∂u y ∂r/∂v, son vectores tangentes a la superficie en el punto dado.
Una propiedad fundamental del producto cruz entre dos vectores es que el resultado es un nuevo vector que es perpendicular a ambos vectores originales. Dado que ∂r/∂u y ∂r/∂v son tangentes a la superficie, su producto cruz será perpendicular a la superficie misma. Por lo tanto, el producto cruz:
∂r/∂u (u,v) x ∂r/∂v (u,v)
es un vector normal a la superficie. La magnitud de este producto cruz también representa el área del paralelogramo infinitesimal que mencionamos, lo cual es fundamental para el cálculo de integrales de superficie.
Cálculo del Vector Normal para Triángulos: Aplicaciones en Gráficos 3D
En el ámbito de la computación gráfica, donde los objetos 3D se construyen a menudo a partir de mallas de triángulos, la necesidad de calcular el vector normal para cada cara (triángulo) es constante. Este vector es vital para determinar cómo la luz incide en la superficie y, por lo tanto, cómo se sombrea el objeto.
Para un triángulo definido por tres vértices, P1, P2 y P3, el vector normal se puede calcular tomando el producto cruz de dos de sus aristas. La clave es el orden de los vértices, ya que esto determinará la dirección del normal (hacia 'adentro' o hacia 'afuera' de la cara, lo cual se relaciona con la orientación de los vértices o 'winding').
El algoritmo es el siguiente:
- Define el vector U como la arista que va de P1 a P2:
U = P2 - P1 - Define el vector V como la arista que va de P1 a P3:
V = P3 - P1 - El vector normal N es el producto cruz de U y V:
N = U x V
Si U = (Ux, Uy, Uz) y V = (Vx, Vy, Vz), las componentes del vector normal N = (Nx, Ny, Nz) se calculan así:
Nx = Uy * Vz - Uz * VyNy = Uz * Vx - Ux * VzNz = Ux * Vy - Uy * Vx
Este método simple y directo es la columna vertebral de muchos algoritmos de renderizado 3D.
Método de Newell: Normales para Polígonos Arbitrarios
Aunque el método del producto cruz es perfecto para triángulos, ¿qué pasa con polígonos con más de tres vértices que no son necesariamente planos? El Método de Newell ofrece una solución elegante para calcular el vector normal de un polígono 3D arbitrario. Este método es robusto y funciona incluso para polígonos no convexos o con agujeros, siempre que sus vértices estén ordenados secuencialmente (en sentido horario o antihorario).
El algoritmo básico de Newell implica iterar a través de los vértices del polígono, tomando el producto cruz de cada par de vértices adyacentes proyectados en los planos coordenados, y sumando estos resultados. La suma final de estos productos cruz parciales produce un vector que es normal al plano promedio del polígono. Luego, este vector se normaliza para obtener un vector unitario. Es una técnica más avanzada pero muy útil para la generalización.
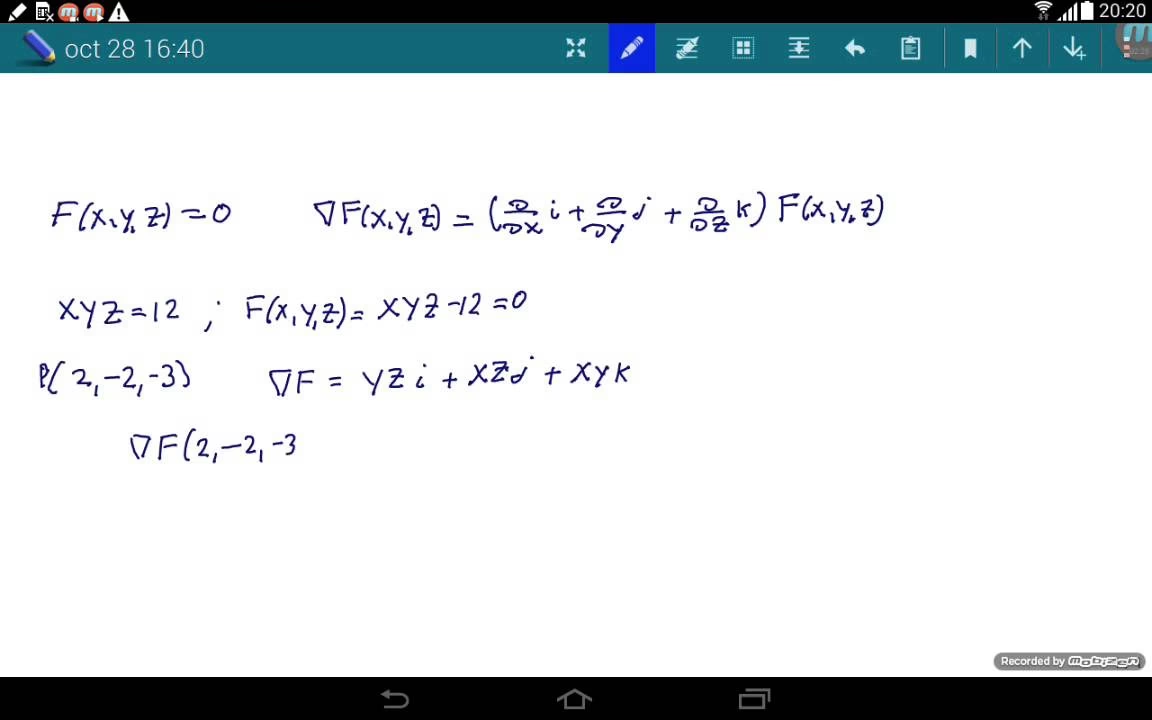
El Vector Normal y las Ecuaciones de Planos y Líneas
Una de las propiedades más sorprendentes y útiles de los vectores normales es su relación directa con las ecuaciones de líneas y planos. Considera la ecuación de una línea en el plano 2D: ax + by = c. O la de un plano en el espacio 3D: ax + by + cz = d.
Estas ecuaciones pueden reescribirse usando el producto escalar (o producto punto). Para el plano, sería (a,b,c) ⋅ (x,y,z) = d, o de forma simplificada, A ⋅ X = d, donde A = (a,b,c) es el vector de coeficientes y X = (x,y,z) es el vector de posición de un punto cualquiera en el plano.
Si P y Q son dos puntos cualesquiera en el plano, entonces se cumple que A ⋅ P = d y A ⋅ Q = d. Restando ambas ecuaciones obtenemos A ⋅ (Q - P) = 0. Esto significa que el vector A es ortogonal al vector (Q - P), que es un vector que va de un punto a otro dentro del plano (un vector direccional o tangente del plano). Dado que esto es cierto para cualquier par de puntos en el plano, el vector A = (a,b,c) es ortogonal a cualquier vector direccional del plano. Por lo tanto, el vector de coeficientes A es un vector normal al plano.
Esta propiedad es increíblemente poderosa, ya que nos permite encontrar un vector normal de un plano simplemente observando los coeficientes de su ecuación. De manera similar, para una línea ax + by = c, el vector (a,b) es un vector normal a la línea.
Ejemplo: Hallando la ecuación de un plano con un normal conocido
Supongamos que conocemos un vector normal A = (1, 2, 3) y un punto P = (1, -1, 4) que pertenece al plano. La ecuación del plano debe ser de la forma (1, 2, 3) ⋅ (x, y, z) = d. Para encontrar 'd', simplemente sustituimos el punto P en la ecuación:
d = (1, 2, 3) ⋅ (1, -1, 4) = 1*1 + 2*(-1) + 3*4 = 1 - 2 + 12 = 11
Así, la ecuación del plano es x + 2y + 3z = 11.
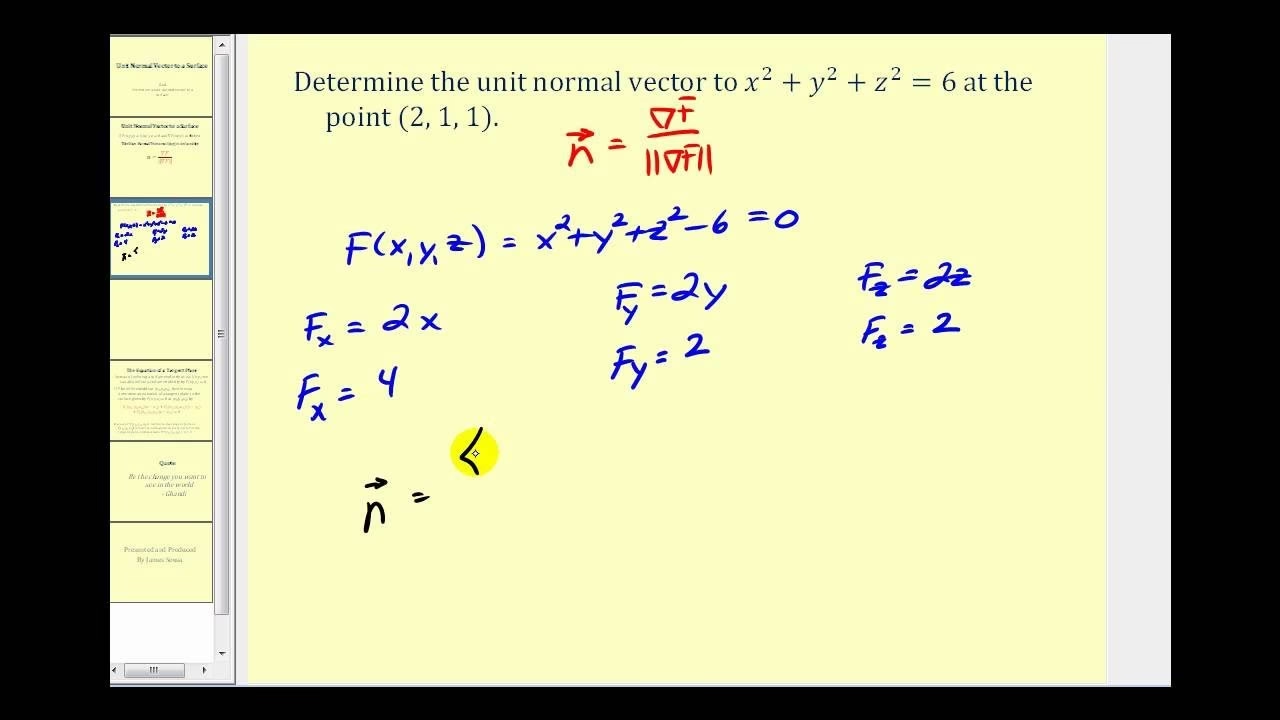
El Vector Unitario Normal: Normalización para Consistencia
A menudo, para estandarizar la representación o para simplificar cálculos posteriores (como en la iluminación de gráficos por computadora), no solo necesitamos un vector normal, sino un vector unitario normal. Un vector unitario es aquel que tiene una longitud o magnitud de 1. Esto significa que solo indica dirección, no magnitud.
Para obtener un vector unitario normal a partir de cualquier vector normal no nulo (N), simplemente dividimos el vector N por su propia magnitud (o norma), denotada como ||N||:
n = N / ||N||
Donde ||N|| = √(Nx² + Ny² + Nz²) para un vector N = (Nx, Ny, Nz).
Por ejemplo, si tenemos un vector normal N = (1, 2, 2), su magnitud es ||N|| = √(1² + 2² + 2²) = √(1 + 4 + 4) = √9 = 3. Entonces, el vector unitario normal es n = (1/3, 2/3, 2/3). También su opuesto, (-1/3, -2/3, -2/3), es un vector unitario normal, apuntando en la dirección opuesta.
El Producto Cruz y la Construcción de Normales (Revisitado)
El producto cruz es una herramienta indispensable para construir vectores normales cuando no tenemos una ecuación directa del plano, sino puntos que lo definen. Si tenemos tres puntos no colineales P, Q y R que definen un plano, podemos encontrar dos vectores que yacen en ese plano, por ejemplo, PQ = Q - P y PR = R - P. El producto cruz de estos dos vectores nos dará un vector normal al plano.
Normal = (Q - P) x (R - P)
Este es el mismo principio utilizado para los triángulos, pero aplicado a un contexto más general de planos.
Ángulos Diedros y Vectores Normales: Una Conexión Geométrica
Los vectores normales no solo definen la orientación de una sola superficie, sino que también son fundamentales para describir la relación entre dos superficies. El ángulo diedro entre dos planos se define como el ángulo formado por la intersección de los dos planos con otro plano que es ortogonal a la línea de intersección común de los dos planos.
Curiosamente, el ángulo entre los vectores normales de los dos planos es el mismo que el ángulo diedro entre los planos. Esto significa que podemos calcular el ángulo diedro de forma sencilla utilizando el producto escalar de los vectores normales de ambos planos y la fórmula del coseno para productos escalares:
cos(θ) = (N1 ⋅ N2) / (||N1|| * ||N2||)
Donde N1 y N2 son los vectores normales de los dos planos, y θ es el ángulo entre ellos. Esta es una aplicación poderosa que simplifica cálculos complejos en geometría.
Tabla Comparativa: Métodos para Hallar el Vector Normal
| Método | Descripción | Aplicación Principal | Ventajas | Consideraciones |
|---|---|---|---|---|
| Producto Cruz (Superficies Parametrizadas) | Producto cruz de derivadas parciales del vector de posición. | Cálculo de área superficial, análisis de curvatura. | Directamente relacionado con la geometría de la superficie. | Requiere la parametrización de la superficie. |
| Producto Cruz (Triángulos/Planos por 3 Puntos) | Producto cruz de dos vectores que forman aristas del triángulo o que yacen en el plano. | Gráficos 3D, definición de planos. | Sencillo y eficiente para elementos discretos. | El orden de los vértices afecta la dirección del normal. |
| Coeficientes de Ecuación Lineal | Los coeficientes (a,b,c) de la ecuación del plano ax+by+cz=d. | Análisis de planos y líneas predefinidos. | Extremadamente fácil si la ecuación es conocida. | No aplica a superficies curvas o no lineales. |
| Método de Newell | Suma ponderada de productos cruz de vértices adyacentes para polígonos 3D. | Modelado 3D de polígonos complejos. | Funciona para polígonos no planos, no convexos. | Requiere que los vértices estén ordenados secuencialmente. |
Preguntas Frecuentes sobre el Vector Normal
¿Para qué sirve el vector normal?
El vector normal es crucial para determinar la orientación de una superficie en el espacio. Sus aplicaciones incluyen: cálculo de áreas superficiales y volúmenes, simulación de fluidos, detección de colisiones en videojuegos, iluminación y sombreado en gráficos 3D, robótica (para la orientación de efectores finales), análisis de esfuerzos en ingeniería, y muchas otras áreas donde la dirección y la perpendicularidad son importantes.
¿Siempre es único el vector normal en un punto dado?
No, un vector normal no es único en su magnitud ni en su dirección. En cualquier punto de una superficie, hay dos direcciones opuestas para el vector normal (apuntando 'hacia afuera' o 'hacia adentro'). Además, cualquier múltiplo escalar no nulo de un vector normal también es un vector normal para esa misma superficie en ese punto. Sin embargo, el vector unitario normal sí es único en su dirección (excepto por la ambigüedad de 'hacia afuera' o 'hacia adentro'), ya que su magnitud es siempre 1.
¿Cuál es la diferencia entre un vector normal y un vector unitario normal?
Un vector normal es cualquier vector que es perpendicular a la superficie en un punto dado, sin restricciones sobre su longitud. Un vector unitario normal es un tipo especial de vector normal que, además de ser perpendicular a la superficie, tiene una magnitud (longitud) de exactamente 1. Los vectores unitarios normales son preferidos en muchas aplicaciones porque solo indican la dirección, lo que simplifica cálculos y garantiza consistencia.
¿Puede una superficie tener un vector normal en cada punto?
Para que una superficie tenga un vector normal bien definido en cada punto, debe ser 'suave' en ese punto, es decir, debe ser diferenciable. En puntos donde la superficie tiene una 'esquina' o un 'borde afilado' (como el vértice de un cubo o el borde de un cilindro truncado), el concepto de vector normal único se vuelve problemático o no existe.
En resumen, el vector normal es una de las herramientas más poderosas en el arsenal de cualquier persona que trabaje con geometría y matemáticas aplicadas. Su capacidad para describir la orientación y la perpendicularidad lo convierte en un concepto indispensable en un sinfín de disciplinas. Dominar su cálculo y comprensión abre las puertas a una mayor comprensión del mundo tridimensional que nos rodea.
Si quieres conocer otros artículos parecidos a Descifrando el Vector Normal: Tu Guía Completa puedes visitar la categoría Cálculos.