29/10/2024
En el vasto universo de la ingeniería eléctrica, los motores asíncronos de corriente alterna son pilares fundamentales que impulsan innumerables procesos, desde la maquinaria industrial más compleja hasta los electrodomésticos que usamos a diario. Sin embargo, su selección y comprensión pueden ser un desafío si no se conocen los parámetros clave. Uno de los conceptos más importantes y a menudo malinterpretados es la frecuencia, un factor que define directamente la velocidad de giro del motor y su comportamiento general.

Este artículo desglosará no solo cómo se calcula la frecuencia en relación con la velocidad de un motor, sino que también explorará todos los criterios esenciales que debes considerar al seleccionar un motor eléctrico asíncrono, ya sea trifásico o monofásico. Entender estos principios te permitirá tomar decisiones informadas, garantizando el rendimiento óptimo y la longevidad de tu equipo. Prepárate para desentrañar los secretos que se esconden detrás de la placa de identificación de un motor y cómo cada valor influye en su operación.
- ¿Qué es la Frecuencia en un Motor Eléctrico y Por Qué es Crucial?
- Hz a RPM: Desvelando la Relación Directa
- Selección de un Motor Eléctrico Asíncrono: Criterios Esenciales
- ¿Qué Implica un Motor de 50 Hz Operando en una Red de 60 Hz (y Viceversa)?
- La Placa de Identificación del Motor: Tu Guía Definitiva
- Preguntas Frecuentes (FAQ)
- ¿Cuál es la diferencia entre la velocidad síncrona y la velocidad real del motor?
- ¿Puedo usar un motor de 50 Hz en una red de 60 Hz?
- ¿Qué significa el grado de protección IP65 en un motor?
- ¿Por qué son más comunes los motores trifásicos que los monofásicos en la industria?
- ¿Cómo afecta la frecuencia a la vida útil de un motor?
¿Qué es la Frecuencia en un Motor Eléctrico y Por Qué es Crucial?
La frecuencia es, en esencia, la medida de cuántas veces un ciclo de corriente eléctrica se repite en un segundo. Se expresa en Hertz (Hz) y es un pilar fundamental en la operación de los motores de corriente alterna. En la mayoría de los países de América Latina, la frecuencia de la red de alimentación es de 50 Hz o 60 Hz, lo que significa que la tensión de la red repite su ciclo cincuenta o sesenta veces por segundo, respectivamente.
Este valor no es meramente un dato técnico; es un factor determinante porque influye directamente en la rotación o velocidad síncrona del motor eléctrico. La velocidad del eje de un motor de corriente alterna está intrínsecamente ligada a la frecuencia de la corriente de alimentación y al número de pares de polos del motor. Comprender esta relación es vital para prever el comportamiento del motor y para realizar ajustes en sistemas donde la velocidad es un parámetro crítico, como cuando se utilizan variadores de velocidad.
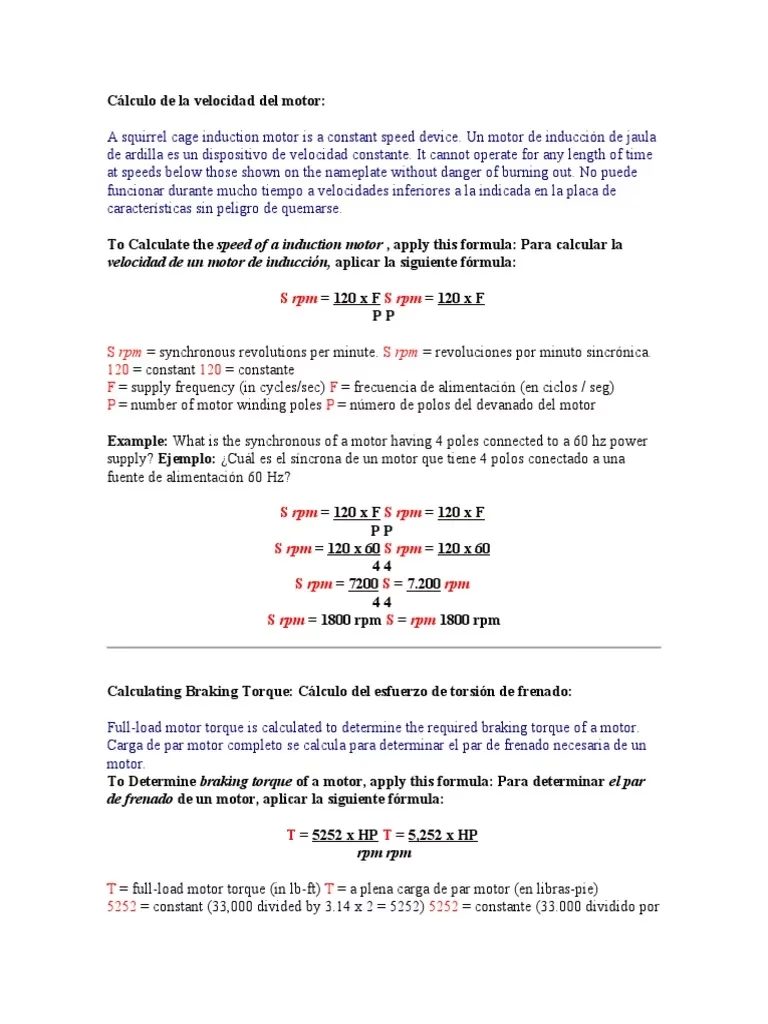
Cálculo de la Velocidad Síncrona del Motor
Para determinar la velocidad síncrona (Ns) de un motor, es decir, la velocidad teórica del campo magnético giratorio en el estator, utilizamos una fórmula sencilla que relaciona la frecuencia de la alimentación y el número de polos del motor. Es importante recordar que esta es la velocidad del campo magnético, no la velocidad real del rotor, que es ligeramente menor debido al deslizamiento.
La fórmula para calcular la velocidad síncrona es la siguiente:
Ns = (60 × Hz) / (Número de Polos / 2)
Donde:
- Ns es la velocidad síncrona en revoluciones por minuto (RPM).
- Hz es la frecuencia de la red de alimentación en Hertz.
- Número de Polos es el número total de polos magnéticos del motor (siempre un número par, como 2, 4, 6, etc.).
Veamos un ejemplo práctico:
Imaginemos un motor de 4 polos conectado a una línea de 50 Hz. Para calcular su velocidad síncrona, aplicamos la fórmula:
Ns = (60 × 50) / (4 / 2)
Ns = 3000 / 2
Ns = 1500 RPM
Esto significa que el campo magnético giratorio de este motor se movería a 1500 revoluciones por minuto. Esta información es increíblemente útil, especialmente cuando se trabaja con Variadores de Frecuencia (VFDs), ya que permite predecir la velocidad de giro del motor al modificar la frecuencia de entrada.
Deslizamiento: La Diferencia entre lo Síncrono y lo Real
Aunque la fórmula anterior nos da la velocidad síncrona, la velocidad real en la punta del eje del motor es siempre un poco menor. Esta diferencia se conoce como deslizamiento. El deslizamiento es inherente a los motores de inducción (asíncronos) y es lo que permite que se induzca corriente en el rotor y se genere par. Factores como la carga aplicada al motor o incluso las variaciones en la tensión de la red de alimentación pueden influir en el deslizamiento y, por ende, en la rotación efectiva del motor.
Los motores de 2 y 4 polos son los más comunes en el mercado debido a su eficiencia y rango de velocidades, lo que los hace adecuados para una amplia gama de aplicaciones.
Hz a RPM: Desvelando la Relación Directa
La frecuencia (Hertz) y las revoluciones por minuto (RPM) son ambas unidades utilizadas para medir la frecuencia o la velocidad de rotación. Aunque la fórmula de velocidad síncrona es específica para motores eléctricos con un número de polos, existe una relación directa y universal para convertir Hertz a RPM y viceversa en un contexto general de rotación.
Cómo Convertir Hertz a Revoluciones por Minuto
Para convertir una medida de frecuencia en Hertz a revoluciones por minuto, simplemente multiplicamos la frecuencia en Hertz por 60. Esto se debe a que un Hertz equivale a 60 revoluciones por minuto (un ciclo por segundo equivale a 60 ciclos por minuto).
Revoluciones por Minuto (RPM) = Hertz (Hz) × 60
Por ejemplo, si tienes una frecuencia de 5 Hertz:
RPM = 5 Hz × 60 = 300 RPM
Esta conversión es fundamental para entender la velocidad de cualquier fenómeno cíclico en términos de rotación por minuto.
Tabla de Conversión de Hertz a RPM
| Hertz (Hz) | Revoluciones por Minuto (RPM) |
|---|---|
| 1 | 60 |
| 5 | 300 |
| 10 | 600 |
| 15 | 900 |
| 20 | 1,200 |
| 25 | 1,500 |
| 30 | 1,800 |
| 40 | 2,400 |
| 50 | 3,000 |
| 60 | 3,600 |
Esta tabla ilustra cómo un aumento en la frecuencia se traduce directamente en un aumento proporcional en las revoluciones por minuto.
Selección de un Motor Eléctrico Asíncrono: Criterios Esenciales
Más allá de la frecuencia, seleccionar el motor eléctrico asíncrono adecuado implica considerar una serie de criterios técnicos que aseguren su compatibilidad con la aplicación deseada y su eficiencia operativa. Estos son los factores más utilizados:
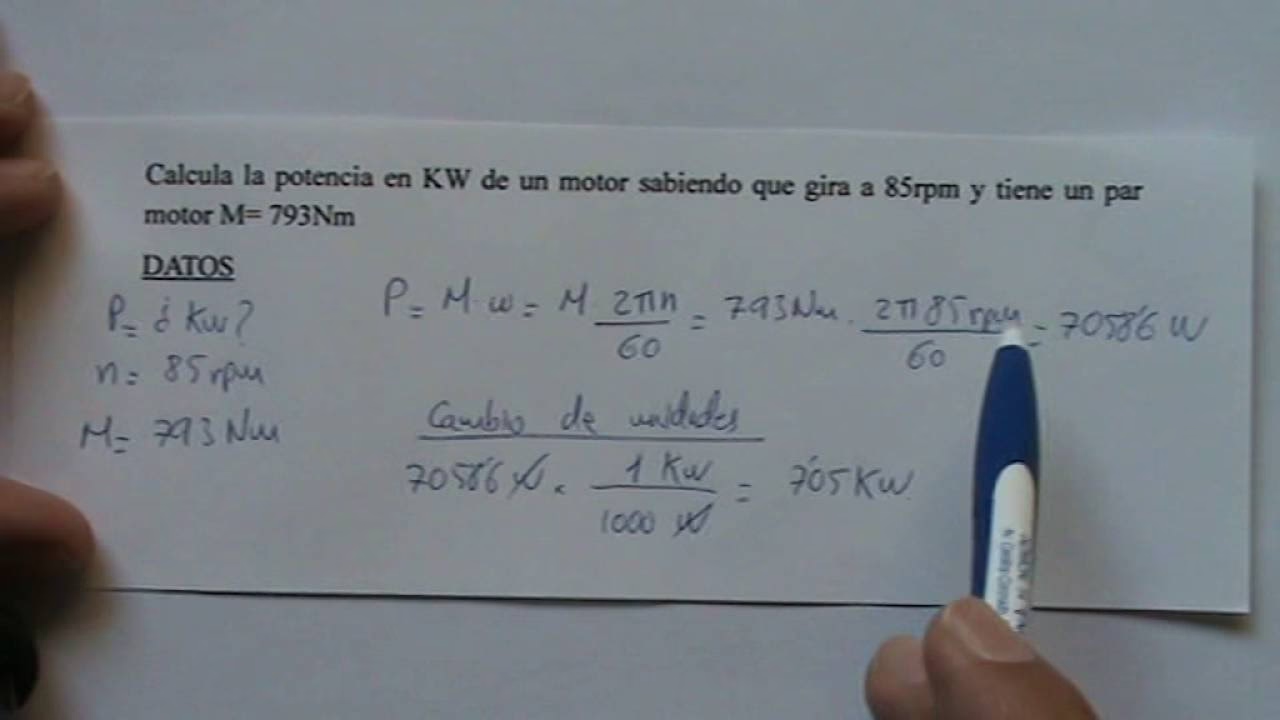
1. La Potencia
La potencia es la capacidad del motor para generar fuerza y mover una carga a una velocidad determinada. La potencia especificada en la placa de identificación de los motores indica la potencia mecánica disponible en la punta del eje y se expresa comúnmente en Kilowatts (KW) y su equivalente en Caballos de Vapor (HP / CV).
Para convertir entre estas unidades de potencia, puedes usar las siguientes fórmulas:
- Para convertir de CV a KW: KW = CV × 0,736
- Para convertir de KW a CV: CV = KW / 0,736
Ejemplo: ¿Cuántos KW tiene un motor de 5,5 CV?
5,50 CV × 0,736 = 4,04 KW (aproximadamente 4,00 KW)
Es crucial entender que la potencia en placa se refiere a la potencia mecánica en el eje. Para obtener la potencia eléctrica consumida por el motor (kW·h), se divide la potencia en KW por su eficiencia (η), que también suele estar especificada en la placa.
Ejemplo de Potencia Eléctrica Consumida:
- Eficiencia (η) = 84,5% (0,845) para un motor de 4 KW / 5,50 CV
- P (kW·h) = (4,00 KW / 0,845) = 4,73 kW·h
Esto representa la cantidad de energía eléctrica que el motor consume para producir la potencia mecánica deseada.
2. La Velocidad/Rotación (RPM)
Como ya hemos visto, la velocidad, expresada en RPM, es el número de giros que el eje del motor desarrolla en cada minuto. En los motores de corriente alterna, la rotación está sincronizada con la frecuencia de la corriente de alimentación y el número de pares de polos. El concepto de deslizamiento es clave aquí, ya que describe la diferencia entre la velocidad síncrona y la velocidad real de rotación del eje. Factores como la carga o la variación de la tensión de la red pueden influir en la rotación final.
3. La Tensión (Voltaje)
La tensión es el voltaje de entrada para el cual está diseñado el motor, es decir, la "presión" con la que la corriente es empujada a través del circuito. Se expresa en voltios (V) y debe coincidir con el voltaje de la máquina o la red a la que se desea accionar.
Tipos de Tensión:
- Monofásica: Tensión medida entre fase y neutro. Comúnmente 110 V o 220 V, aunque puede variar (115 V, 230 V, 254 V). Los motores monofásicos son para aplicaciones de menor potencia.
- Trifásica: Tensión medida entre fases. Son los motores más utilizados en la industria, ya que ofrecen mayor eficiencia, rendimientos superiores y pares más elevados en comparación con los monofásicos, lo que reduce su costo operacional. Las tensiones trifásicas más comunes son 220-230 V, 380-400 V a 50Hz y 440 V a 60Hz.
Los motores se diseñan con parámetros estándar para adaptarse a diferentes voltajes y frecuencias, manteniendo la potencia nominal dentro de ciertas tolerancias (generalmente +/- 5% del valor nominal a frecuencia nominal). Las normas DIN IEC 38 establecen estos voltajes base.
4. La Frecuencia (Hz)
Ya hemos profundizado en este aspecto. La frecuencia de la red de alimentación (50 Hz o 60 Hz) es un factor crítico que influye directamente en la rotación del motor eléctrico. Es esencial que el motor sea compatible con la frecuencia de la red donde será instalado para asegurar su correcto funcionamiento y evitar sobrecargas o rendimientos deficientes.
5. Grado de Protección (Código IP)
El grado de protección (IP, del inglés Ingress Protection) indica la resistencia del motor contra la entrada de cuerpos extraños (polvo, fibras, etc.), el contacto accidental y la penetración de agua. Se define por dos letras (IP) seguidas de dos dígitos:
- Primer dígito: Protección contra la entrada de cuerpos sólidos y contacto accidental (0 al 6).
- Segundo dígito: Protección contra la entrada de agua (0 al 9K).
Por ejemplo, un motor con grado de protección IP55 es protegido contra el polvo (5) y chorros de agua de baja presión (5), haciéndolo adecuado para entornos industriales con cierta humedad.
6. La Carcasa/Tamaño (H)
Las dimensiones del motor se expresan a través de valores estándar establecidos por normativas IEC. El tipo de carcasa es fundamental, ya que identifica gran parte de las dimensiones mecánicas del motor. El tamaño de la carcasa se define por la potencia y rotación del motor y se identifica por la letra H, que representa la altura desde la base de soporte del motor hasta el centro del eje, medida en milímetros (mm).
7. Las Formas Constructivas
Determinan cómo el motor va a ser fijado y acoplado a la carga. La forma constructiva más común es la B3D (montaje en posición horizontal, motor con patas, eje a la derecha mirando hacia la caja de conexión). Existen otras formas (B5, B14, etc.) que se adaptan a diferentes métodos de montaje, como montaje con brida o sin patas.
8. Las Clases de Aislamiento
Especifican la temperatura máxima de operación que pueden soportar los materiales aislantes utilizados en el devanado del motor sin degradarse. La clase de aislamiento más común es la F, que permite una temperatura máxima de operación de 155°C. La clase H permite una temperatura máxima de 180°C. Es importante recordar que esta temperatura se refiere al aislamiento interno del motor, no a la temperatura ambiente máxima.

9. La Ventilación
El sistema de ventilación es crucial para la refrigeración del motor y evitar el sobrecalentamiento. Los motores con grado de protección IP55 (cerrados) suelen tener un sistema de ventilación forzada externa (TCVE o TEFC), donde un ventilador externo empuja aire sobre la carcasa. Los motores con grado de protección IP23 (abiertos) poseen un sistema de ventilación interna, permitiendo que el aire circule a través del devanado.
¿Qué Implica un Motor de 50 Hz Operando en una Red de 60 Hz (y Viceversa)?
La frecuencia de la red de alimentación es un factor crítico para el diseño y el rendimiento de un motor eléctrico. Un motor está diseñado para funcionar de manera óptima a una frecuencia específica (50 Hz o 60 Hz). Operarlo en una frecuencia diferente a la de su diseño puede tener efectos significativos en su rendimiento y vida útil.
Motor Diseñado para 50 Hz Operando en una Red de 60 Hz
Cuando un motor diseñado para 50 Hz se conecta a una red de 60 Hz (asumiendo que el voltaje de operación nominal es el mismo), ocurren varios fenómenos:
- Aumento de Velocidad: El motor girará aproximadamente un 20% más rápido. Por ejemplo, un motor de 2 polos que a 50 Hz operaría a 3000 RPM (síncronas) lo hará a 3600 RPM (síncronas) a 60 Hz.
- Reducción de Potencia: La potencia nominal del motor se reducirá en una proporción de 50/60 Hz. Esto significa que si el motor trabaja a plena carga, la carga debe reducirse en la misma proporción para mantener la temperatura del motor dentro de los límites nominales.
- Impacto en el Par: La curva de par/velocidad se verá afectada. Para mantener el par deseado, podría ser necesario aumentar el voltaje, siempre con precaución para no exceder los límites de aislamiento.
- Mayor Refrigeración: A mayor velocidad, el ventilador interno del motor proporciona una mejor refrigeración, lo cual es un efecto positivo.
- Peor Factor de Potencia: El factor de potencia del motor empeorará, lo que no es deseable desde el punto de vista de la eficiencia energética.
- Sistema Magnético: El sistema magnético del motor no alcanzará la saturación a 60 Hz, lo que puede ser beneficioso en algunos aspectos, pero también indica que no está trabajando en su punto de diseño óptimo.
- Desgaste: El aumento de la velocidad puede sobrecargar los cojinetes (rodamientos) y generar calor adicional, lo que potencialmente acortará la vida útil del motor y de la carga acoplada (bomba, ventilador, etc.).
- Voltaje en Vacío: Si el motor funciona sin carga, el voltaje puede ser muy superior al valor nominal, lo que podría provocar fallos en el aislamiento del devanado del motor.
Motor Diseñado para 60 Hz Operando en una Red de 50 Hz
Inversamente, si un motor diseñado para 60 Hz se opera en una red de 50 Hz, los efectos son igualmente críticos:
- Reducción de Velocidad: El motor girará más lento, aproximadamente un 20% menos rápido.
- Sobrecarga Magnética: El motor puede quedar magnéticamente sobrecargado. Esto se debe a que la menor frecuencia, si el voltaje se mantiene constante, provoca un aumento del flujo magnético, lo que lleva a una mayor corriente absorbida.
- Aumento de Corriente y Calor: Una mayor corriente significa una mayor generación de calor dentro del motor, lo que puede causar daños en el aislamiento y, en última instancia, una falla del motor.
Es fundamental considerar que, al variar la frecuencia, especialmente con variadores de frecuencia, se debe mantener una relación V/Hz (voltios por Hertz) constante para asegurar el correcto funcionamiento del motor y evitar la saturación magnética o la falta de par.
La Placa de Identificación del Motor: Tu Guía Definitiva
La placa de identificación de un motor es una mina de oro de información. En ella, encontrarás casi todos los datos necesarios para identificar y seleccionar el motor adecuadamente: la potencia (KW/HP), la velocidad (RPM), la tensión nominal (V), la frecuencia (Hz), el número de fases, el factor de potencia, la eficiencia, el grado de protección (IP), la clase de aislamiento y a menudo el tipo de carcasa o tamaño. Consultar esta placa es siempre el primer paso y el más importante al considerar la sustitución o aplicación de un motor.
Preguntas Frecuentes (FAQ)
¿Cuál es la diferencia entre la velocidad síncrona y la velocidad real del motor?
La velocidad síncrona es la velocidad del campo magnético giratorio en el estator del motor, calculada a partir de la frecuencia de la red y el número de polos. La velocidad real del rotor es siempre ligeramente inferior a la velocidad síncrona debido al fenómeno del deslizamiento. Este deslizamiento es necesario para que se induzca corriente en el rotor y se genere el par motor.
¿Puedo usar un motor de 50 Hz en una red de 60 Hz?
Sí, es posible, pero con consideraciones importantes. El motor funcionará más rápido (aproximadamente un 20% más) y su potencia nominal se reducirá en la proporción de 50/60. Esto puede generar mayor desgaste en los cojinetes y en la carga acoplada. Si la carga es constante, es probable que el motor se sobrecaliente a menos que se reduzca la carga. Es crucial verificar que el voltaje de operación sea el mismo o se ajuste con un variador de frecuencia manteniendo la relación V/Hz.
¿Qué significa el grado de protección IP65 en un motor?
El grado de protección IP65 significa que el motor está totalmente protegido contra el polvo (primer dígito '6') y contra chorros de agua potentes desde cualquier dirección (segundo dígito '5'). Esto lo hace adecuado para entornos donde puede haber exposición a polvo, suciedad y chorros de agua, como en ciertas aplicaciones industriales o al aire libre.
¿Por qué son más comunes los motores trifásicos que los monofásicos en la industria?
Los motores trifásicos son preferidos en aplicaciones industriales por varias razones: ofrecen mayor potencia con un tamaño y costo menores por unidad de potencia, tienen un par de arranque más alto, son más eficientes, su funcionamiento es más suave y generan menos vibraciones. Los motores monofásicos tienen limitaciones de potencia y generalmente son más adecuados para aplicaciones domésticas o de menor demanda.
¿Cómo afecta la frecuencia a la vida útil de un motor?
Operar un motor a una frecuencia diferente a la de su diseño puede afectar significativamente su vida útil. Una frecuencia más alta de lo diseñado (ej., 50 Hz en 60 Hz) puede aumentar la velocidad y la temperatura de los cojinetes, provocando un desgaste prematuro. Una frecuencia más baja de lo diseñado (ej., 60 Hz en 50 Hz) puede causar sobrecarga magnética y un aumento excesivo de la corriente, lo que lleva a un sobrecalentamiento del devanado y degradación del aislamiento, acortando drásticamente la vida útil del motor. La clave es la compatibilidad y el ajuste adecuado.
En resumen, la correcta selección y comprensión de los parámetros de un motor eléctrico, especialmente la frecuencia y su relación con la velocidad, son fundamentales para garantizar la eficiencia, la seguridad y la durabilidad de cualquier sistema electromecánico. La placa de identificación del motor es tu aliada, proporcionando los datos esenciales para tomar decisiones informadas. Al prestar atención a la potencia, la tensión, la velocidad, el grado de protección y cómo estas interactúan con la frecuencia de tu red, estarás bien equipado para seleccionar el motor perfecto para tus necesidades y optimizar su rendimiento a lo largo del tiempo.
Si quieres conocer otros artículos parecidos a Calculando la Frecuencia y Seleccionando tu Motor puedes visitar la categoría Calculadoras.