14/02/2025
Los vectores son herramientas fundamentales en física, ingeniería y matemáticas, permitiéndonos representar magnitudes que tienen tanto una magnitud como una dirección, como la velocidad, la fuerza o el desplazamiento. Tradicionalmente, estamos acostumbrados a representarlos en un plano cartesiano utilizando coordenadas (x, y). Sin embargo, existe otra forma igualmente poderosa y a menudo más intuitiva para ciertas aplicaciones: la forma polar. Esta representación, que utiliza una distancia al origen y un ángulo, simplifica enormemente el análisis de rotaciones, movimientos circulares y fenómenos ondulatorios. Comprender cómo transformar vectores entre estas dos representaciones y cómo operar con ellos en forma polar es esencial para cualquier estudiante o profesional que trabaje con estas magnitudes. Acompáñanos en este viaje para desentrañar los misterios de las coordenadas polares y su aplicación a los vectores.
Transformando un Vector de Coordenadas Cartesianas a Polares
Para entender cómo convertir un vector de su forma cartesiana (x, y) a su forma polar (r, θ), primero debemos recordar qué representa cada componente.
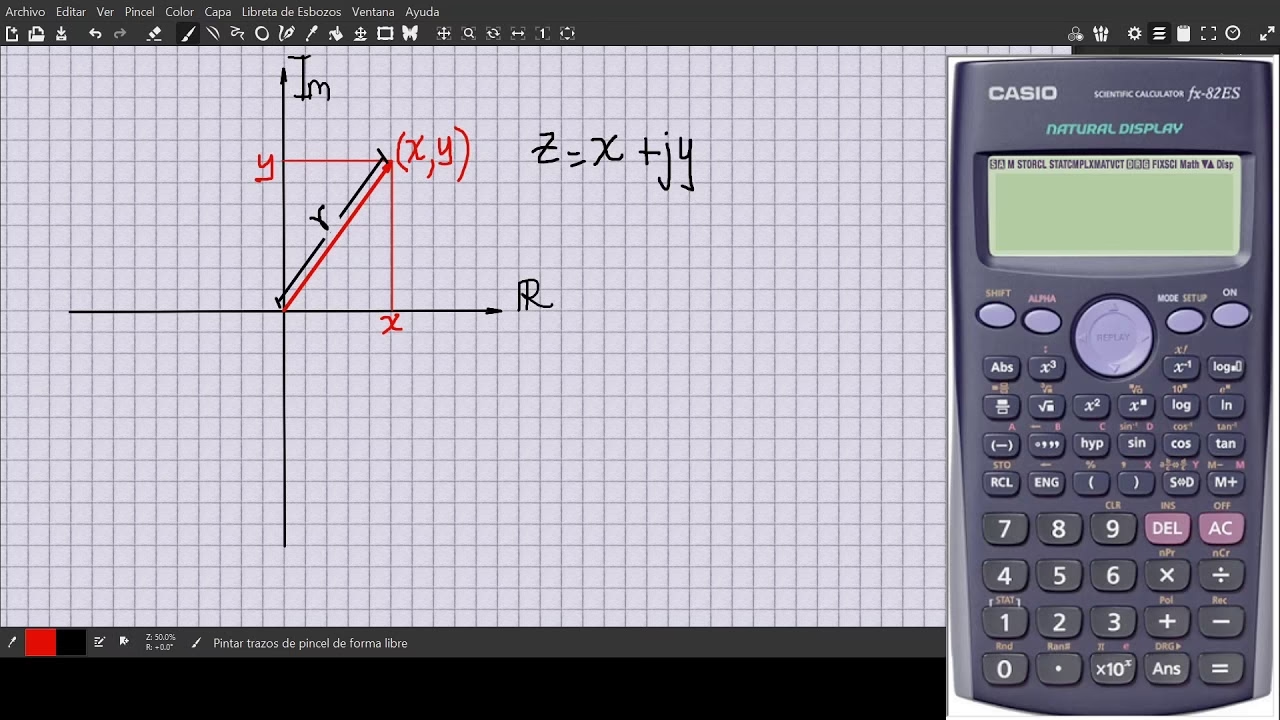
En el sistema de coordenadas cartesianas, un vector se define por sus componentes horizontal (x) y vertical (y) desde el origen. Por ejemplo, un vector (3, 4) se extiende 3 unidades en el eje X positivo y 4 unidades en el eje Y positivo.
En el sistema de coordenadas polares, el mismo vector se describe mediante su magnitud (r), que es la longitud del vector desde el origen hasta su punto final, y su ángulo (θ), que es el ángulo que forma el vector con el semieje positivo de las X (generalmente medido en sentido antihorario).
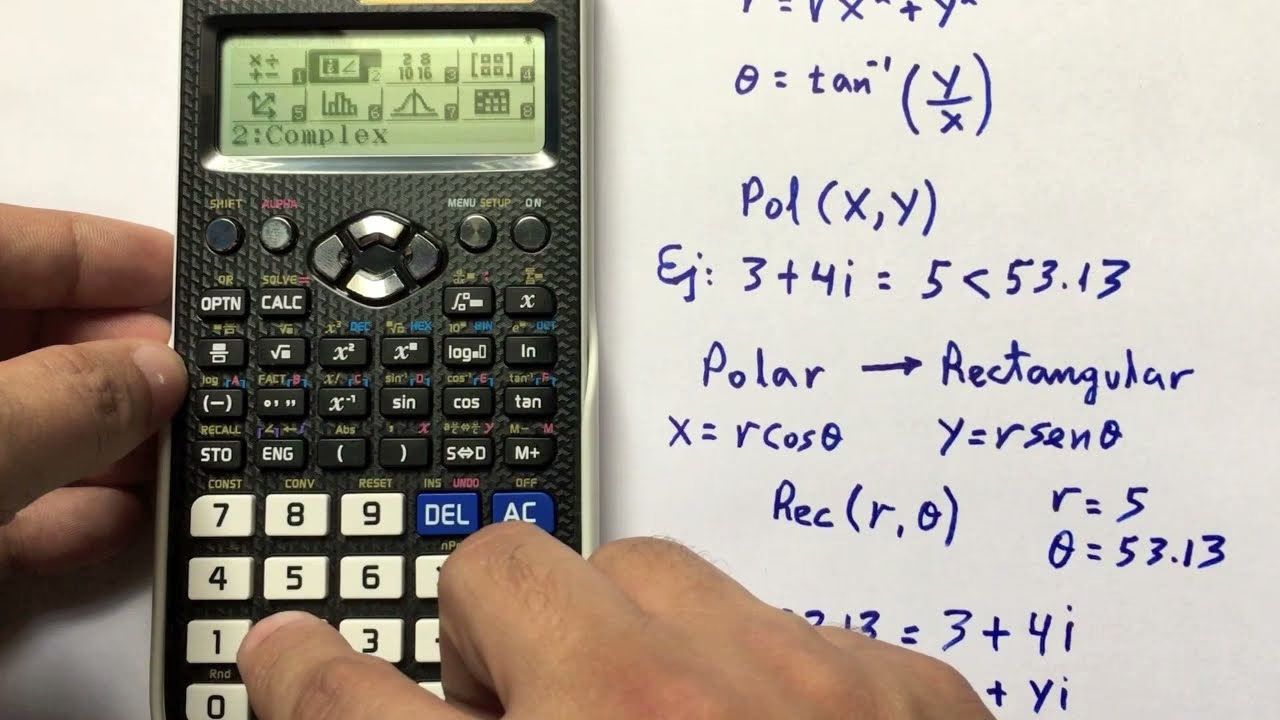
Para realizar esta conversión, utilizaremos las siguientes fórmulas derivadas del teorema de Pitágoras y las funciones trigonométricas básicas:
1. Cálculo de la Magnitud (r):
La magnitud 'r' es simplemente la hipotenusa del triángulo rectángulo formado por las componentes 'x' e 'y'.
r = sqrt(x² + y²)
Donde sqrt es la raíz cuadrada.
2. Cálculo del Ángulo (θ):
El ángulo 'θ' se puede calcular utilizando la función tangente inversa. Sin embargo, hay una consideración crucial: la función atan (o arctan) estándar solo devuelve ángulos en el rango de -90° a 90° (o -π/2 a π/2 radianes). Esto significa que no distingue correctamente entre cuadrantes, por ejemplo, un vector en el primer cuadrante (x>0, y>0) y un vector en el tercer cuadrante (x<0, y<0) pueden tener la misma tangente.
Para resolver esto, es fundamental usar la función atan2(y, x). Esta función toma las dos componentes (y y x) por separado y determina el cuadrante correcto para el ángulo, devolviendo un valor en el rango de -180° a 180° (o -π a π radianes). Esta es la forma más segura de obtener el ángulo correcto para cualquier vector.
θ = atan2(y, x)
Ejemplo Práctico de Conversión:
Consideremos un vector V en coordenadas cartesianas (3, 4).
- Calcular r:
r = sqrt(3² + 4²) = sqrt(9 + 16) = sqrt(25) = 5 - Calcular θ:
θ = atan2(4, 3)
Si usamos una calculadora,atan2(4, 3)nos dará aproximadamente 53.13 grados (o 0.927 radianes).
Por lo tanto, el vector (3, 4) en forma cartesiana es (5, 53.13°) en forma polar.
Otro Ejemplo: Vector en el Tercer Cuadrante:
Consideremos un vector V en coordenadas cartesianas (-2, -2).
- Calcular r:
r = sqrt((-2)² + (-2)²) = sqrt(4 + 4) = sqrt(8) ≈ 2.828 - Calcular θ:
θ = atan2(-2, -2)
Si usamos una calculadora,atan2(-2, -2)nos dará -135 grados o 225 grados (si se mide en sentido antihorario desde 0 a 360 grados). Es crucial entender que la función arctan2 es la clave para la correcta determinación del cuadrante del ángulo.
Suma de Vectores en Coordenadas Polares: El Enfoque Correcto
Aquí es donde a menudo surge una confusión. Una pregunta común es: "¿Cómo se suman las coordenadas polares?" La respuesta directa es que no se suman directamente de la misma manera que las coordenadas cartesianas. Es decir, si tienes dos vectores en forma polar (r1, θ1) y (r2, θ2), no puedes simplemente sumar r1 + r2 y θ1 + θ2 para obtener el vector resultante. Hacer esto conduciría a un resultado incorrecto, ya que la adición de vectores es una operación geométrica que considera tanto la magnitud como la dirección.
La forma correcta y más fiable de sumar dos o más vectores que están expresados en forma polar es convertirlos primero a su forma cartesiana, realizar la suma en coordenadas cartesianas, y luego, si es necesario, convertir el vector resultante de nuevo a forma polar. Este proceso garantiza la precisión y respeta la naturaleza vectorial de las cantidades.
A continuación, se detalla el procedimiento paso a paso:
Paso 1: Convertir cada Vector de Polar a Cartesiano.
Para cada vector (r, θ), sus componentes cartesianas (x, y) se calculan usando las siguientes fórmulas trigonométricas:
x = r * cos(θ)y = r * sin(θ)
Es vital asegurarse de que el ángulo θ esté en la unidad correcta (radianes o grados) según lo requiera la función cos y sin de su calculadora o lenguaje de programación. En la mayoría de los contextos computacionales, los ángulos se esperan en radianes.
- Para el Vector 1: (r1, θ1) se convierte a (x1, y1)
x1 = r1 * cos(θ1)y1 = r1 * sin(θ1) - Para el Vector 2: (r2, θ2) se convierte a (x2, y2)
x2 = r2 * cos(θ2)y2 = r2 * sin(θ2)
Paso 2: Sumar las Componentes Cartesianas.
Una vez que ambos vectores están en su forma cartesiana, la suma es directa:
El vector resultante V_suma = (x_suma, y_suma) se obtiene sumando las componentes 'x' y 'y' de cada vector:
x_suma = x1 + x2y_suma = y1 + y2
Paso 3: Convertir el Vector Resultante de Cartesiano a Polar (Opcional, pero Común).
Si el objetivo final es tener el vector suma en forma polar, se realiza la conversión inversa utilizando las fórmulas de la sección anterior:
r_suma = sqrt(x_suma² + y_suma²)θ_suma = atan2(y_suma, x_suma)
Ejemplo Práctico de Suma de Vectores Polares:
Supongamos que tenemos dos vectores:
Vector A: (rA = 5, θA = 30°)
Vector B: (rB = 3, θB = 120°)
Primero, convertiremos los ángulos a radianes para los cálculos (30° = π/6 rad ≈ 0.5236 rad, 120° = 2π/3 rad ≈ 2.0944 rad).
- Convertir A a Cartesiano:
xA = 5 * cos(30°) = 5 * (sqrt(3)/2) ≈ 5 * 0.866 = 4.33yA = 5 * sin(30°) = 5 * (1/2) = 2.5
Vector A en cartesiano: (4.33, 2.5) - Convertir B a Cartesiano:
xB = 3 * cos(120°) = 3 * (-1/2) = -1.5yB = 3 * sin(120°) = 3 * (sqrt(3)/2) ≈ 3 * 0.866 = 2.598
Vector B en cartesiano: (-1.5, 2.598) - Sumar Componentes Cartesianas:
x_suma = xA + xB = 4.33 + (-1.5) = 2.83y_suma = yA + yB = 2.5 + 2.598 = 5.098
Vector Resultante en cartesiano: (2.83, 5.098) - Convertir el Resultante a Polar:
r_suma = sqrt(2.83² + 5.098²) = sqrt(8.0089 + 25.9896) = sqrt(33.9985) ≈ 5.83θ_suma = atan2(5.098, 2.83)θ_suma ≈ 60.99°(o aproximadamente 1.064 radianes)
Así, la suma de los vectores (5, 30°) y (3, 120°) es aproximadamente (5.83, 60.99°) en forma polar. Este proceso, aunque parece más largo, es el único método correcto para la suma de vectores expresados en coordenadas polares. La conversión a componentes cartesianas es un paso fundamental.
Comparación entre Coordenadas Cartesianas y Polares
Ambos sistemas de coordenadas tienen sus fortalezas y debilidades, y la elección de cuál usar a menudo depende de la naturaleza del problema que se está resolviendo.
| Característica | Coordenadas Cartesianas (x, y) | Coordenadas Polares (r, θ) |
|---|---|---|
| Representación | Distancia horizontal (x) y vertical (y) desde el origen. | Distancia radial (r) desde el origen y ángulo (θ) con el eje X positivo. |
| Suma de Vectores | Directa y sencilla: (x1+x2, y1+y2). | Requiere conversión a cartesianas, suma, y luego reconversión a polares. |
| Multiplicación/División (escalar) | Directa: (kx, ky). | Directa para magnitud: (kr, θ). |
| Rotaciones | Requiere matrices de rotación o fórmulas trigonométricas. | Muy sencilla: simplemente se suma o resta el ángulo de rotación a θ. |
| Movimiento Circular | Ecuaciones más complejas (senos y cosenos). | Ecuaciones intrínsecamente simples y naturales (r constante, θ variable). |
| Ejemplo de Uso | Posición de un objeto en un mapa, desplazamiento lineal. | Posición de un satélite en órbita, patrones de ondas, robótica con brazos articulados. |
Como se puede observar, mientras que las coordenadas cartesianas son excelentes para la adición y el análisis de movimientos lineales, las coordenadas polares brillan en situaciones que implican rotaciones, ángulos o distancias desde un punto central. Su utilidad se extiende a campos como la navegación, la acústica, la óptica y la mecánica celeste.
Preguntas Frecuentes (FAQs)
¿Por qué no puedo sumar directamente las coordenadas polares?
La razón principal es que las coordenadas polares (r, θ) no representan componentes lineales ortogonales como las (x, y) cartesianas. La magnitud 'r' es una distancia desde el origen, y 'θ' es un ángulo. Si sumaras directamente 'r's y 'θ's, estarías combinando una distancia con otra distancia y un ángulo con otro ángulo sin considerar la interacción geométrica de sus direcciones. Imagina dos personas caminando 5 metros cada una; si la primera camina al este y la segunda al norte, su desplazamiento total no es simplemente 10 metros en una dirección arbitraria. La suma vectorial es una operación que debe considerar tanto la magnitud como la dirección de cada vector para encontrar el vector resultante que representa el efecto combinado.
¿Qué es atan2 y por qué es mejor que atan (arctan)?
La función atan(y/x) o arctan(y/x) es la inversa de la tangente y devuelve un ángulo en el rango de -90° a +90° (o -π/2 a +π/2 radianes). Esto significa que no puede distinguir entre un vector en el primer cuadrante (x positivo, y positivo) y un vector en el tercer cuadrante (x negativo, y negativo), ya que ambos tendrían una relación y/x positiva. Del mismo modo, no distinguiría entre el segundo y el cuarto cuadrante.
atan2(y, x) es una versión mejorada de la tangente inversa. Toma las componentes 'y' y 'x' por separado, lo que le permite determinar en qué cuadrante se encuentra el punto (x, y) y, por lo tanto, devolver el ángulo correcto en el rango completo de -180° a +180° (o -π a +π radianes). Esto es crucial para la precisión en la conversión de cartesianas a polares, ya que asegura que el ángulo del vector apunte en la dirección correcta en el plano.
¿En qué unidades se expresa el ángulo (grados o radianes)?
Matemáticamente, la unidad estándar y más natural para el ángulo es el radián. En la mayoría de las fórmulas físicas y matemáticas (especialmente aquellas que involucran cálculo, como derivadas e integrales de funciones trigonométricas), se asume que los ángulos están en radianes. Las calculadoras científicas y los lenguajes de programación suelen tener modos para operar en grados o radianes, pero por defecto, las funciones trigonométricas (sin, cos, tan, atan2) esperan radianes. Siempre es fundamental verificar la configuración de su herramienta de cálculo o la documentación de la función para evitar errores.
¿Cuándo es más útil la forma polar de un vector?
La forma polar de un vector es particularmente útil en situaciones donde la dirección y la distancia desde un punto central son las características más relevantes. Algunos ejemplos incluyen:
- Navegación y Robótica: Para describir la posición de un barco, avión o robot móvil en relación con un punto de origen (por ejemplo, su puerto o punto de partida).
- Física: Análisis de movimientos circulares, órbitas planetarias, ondas (sonido, luz) donde la amplitud y la fase (ángulo) son clave.
- Ingeniería Eléctrica: En el análisis de circuitos de corriente alterna (AC), donde las impedancias y voltajes se representan como fasores (vectores polares) para simplificar los cálculos de fase.
- Gráficos por Computadora: Para rotaciones de objetos alrededor de un punto, o para generar patrones como espirales o círculos.
En resumen, siempre que un problema tenga una simetría radial o involucre rotaciones, el uso de coordenadas polares simplificará enormemente la descripción y el análisis.
Conclusión
Dominar la conversión entre sistemas de coordenadas cartesianas y polares, y entender cómo operar con vectores en cada uno, es una habilidad invaluable en numerosos campos científicos y de ingeniería. Hemos visto que, si bien la conversión de cartesiano a polar implica el cálculo de la magnitud y el ángulo con la ayuda crucial de la función arctan2, la suma de vectores en forma polar no es tan directa como podríamos pensar. Requiere una conversión intermedia a componentes cartesianas, la suma de estas componentes, y finalmente, la reconversión del vector resultante a su forma polar si así se desea. Esta metodología asegura que la adición vectorial se realice de forma correcta y precisa. Al elegir el sistema de coordenadas adecuado para cada problema, podemos simplificar cálculos complejos y obtener una comprensión más profunda de los fenómenos que estamos analizando. La versatilidad de los vectores, ya sea en su forma cartesiana o polar, los convierte en una piedra angular del pensamiento cuantitativo.
Si quieres conocer otros artículos parecidos a Vectores: De Coordenadas Cartesianas a Polares puedes visitar la categoría Cálculos.