27/03/2022
El movimiento de los cuerpos en rotación es un campo fascinante de la física, lleno de complejidades que van más allá de lo que se percibe a simple vista. Cuando un objeto gira, su distribución de masa juega un papel crucial en cómo responde a las fuerzas y momentos. Aquí es donde el concepto de tensor de inercia se vuelve indispensable. Este tensor no es solo un número, sino una herramienta matemática que caracteriza la relación entre el momento cinético de un sólido rígido y su velocidad de rotación, revelando cómo la masa se distribuye alrededor de un punto o eje específico. Comprender este concepto es fundamental para cualquier persona que desee profundizar en la dinámica de los cuerpos rígidos, desde el diseño de rotores hasta el análisis del movimiento de planetas.
Si alguna vez te has preguntado por qué un patinador sobre hielo gira más rápido al encoger sus brazos o cómo un giroscopio mantiene su estabilidad, la respuesta reside en el momento de inercia y, en un nivel más avanzado, en el tensor de inercia. Acompáñanos en este recorrido para desvelar los misterios de esta magnitud fundamental.
- El Momento de Inercia: Una Primera Aproximación
- Ejemplos Prácticos de Momentos de Inercia Escalares
- Momentos de Inercia para Cuerpos Continuos: Una Visión General
- Productos de Inercia
- Teoremas Clave para el Cálculo de Momentos de Inercia
- Radio de Giro
- El Tensor de Inercia: La Herramienta Definitiva
- Ejes Principales de Inercia
- Preguntas Frecuentes sobre el Tensor de Inercia
El Momento de Inercia: Una Primera Aproximación
Para entender el tensor de inercia, primero debemos comprender su predecesor escalar: el momento de inercia respecto a un eje. Este concepto es una medida de la resistencia de un objeto a cambiar su estado de movimiento rotacional, de manera análoga a cómo la masa es una medida de la inercia lineal.
Momento de Inercia para una Partícula
Imaginemos una partícula de masa m que se mueve en un círculo de radio R alrededor de un punto O con una velocidad angular ω. Su momento cinético (o momento angular) con respecto a O se define como LO = OP × (mv). Si la partícula describe una circunferencia con velocidad angular ω, su velocidad lineal v es perpendicular al radio vector OP y su magnitud es |v| = |ω|R.
En este caso simplificado, el momento cinético de la partícula respecto al centro de la circunferencia tiene la misma dirección y sentido que la velocidad angular, y su magnitud es |LO| = mR2|ω|. Esta relación nos permite definir el momento de inercia de la partícula respecto al eje de rotación Δ como:
IΔ = mR2
Este escalar, mR2, es una medida de la inercia de la partícula con respecto al movimiento de rotación alrededor del eje Δ. En este escenario ideal, LO = IΔω, lo que significa que el momento cinético y la velocidad angular son paralelos.
Momento de Inercia para un Sistema de Partículas o Cuerpo Continuo
Para un sistema de partículas o un sólido rígido, el momento cinético total es la suma de los momentos cinéticos de cada una de las partículas que lo componen. En el caso de un cuerpo continuo, esta suma se convierte en una integral. Si consideramos un disco que rota alrededor de un eje perpendicular a su centro, cada elemento de masa dm a una distancia r del centro contribuye con un momento cinético dLO = r2dmω.
Sumando (integrando) todas estas contribuciones sobre el volumen o superficie del cuerpo, obtenemos:
LO = (∫ r2dm) ω
La cantidad entre paréntesis es el momento de inercia del cuerpo respecto al eje Δ:
IΔ = ∫ r2dm
Esta relación, LO = IΔω, solo se cumple si el eje de rotación es un eje de simetría del sólido. Cuando no lo es, los vectores momento cinético y velocidad angular no son paralelos, y es aquí donde entra en juego el tensor de inercia, una magnitud tensorial que generaliza el momento de inercia escalar y permite una relación lineal entre estas dos magnitudes vectoriales: LO = IO · ω.
Ejemplos Prácticos de Momentos de Inercia Escalares
El cálculo del momento de inercia depende de la forma del objeto y de la distribución de su masa. A continuación, exploramos algunos ejemplos comunes:
Varilla Homogénea
Para una varilla de longitud H y masa total M, distribuida uniformemente, el momento de inercia respecto a un eje perpendicular que pasa por su centro es:
I = ∫ R2 dm = ∫-H/2H/2 x2 (M/H dx) = MH2/12
Donde dm = (M/H)dx es la masa de un elemento diferencial de longitud dx.
Superficie Cilíndrica
Una superficie cilíndrica (como un anillo delgado) de radio R y masa M, rotando alrededor de su eje central (eje z), tiene un momento de inercia simple porque toda su masa está a la misma distancia R del eje:
Izz = ∫ R2 dm = R2 ∫ dm = MR2
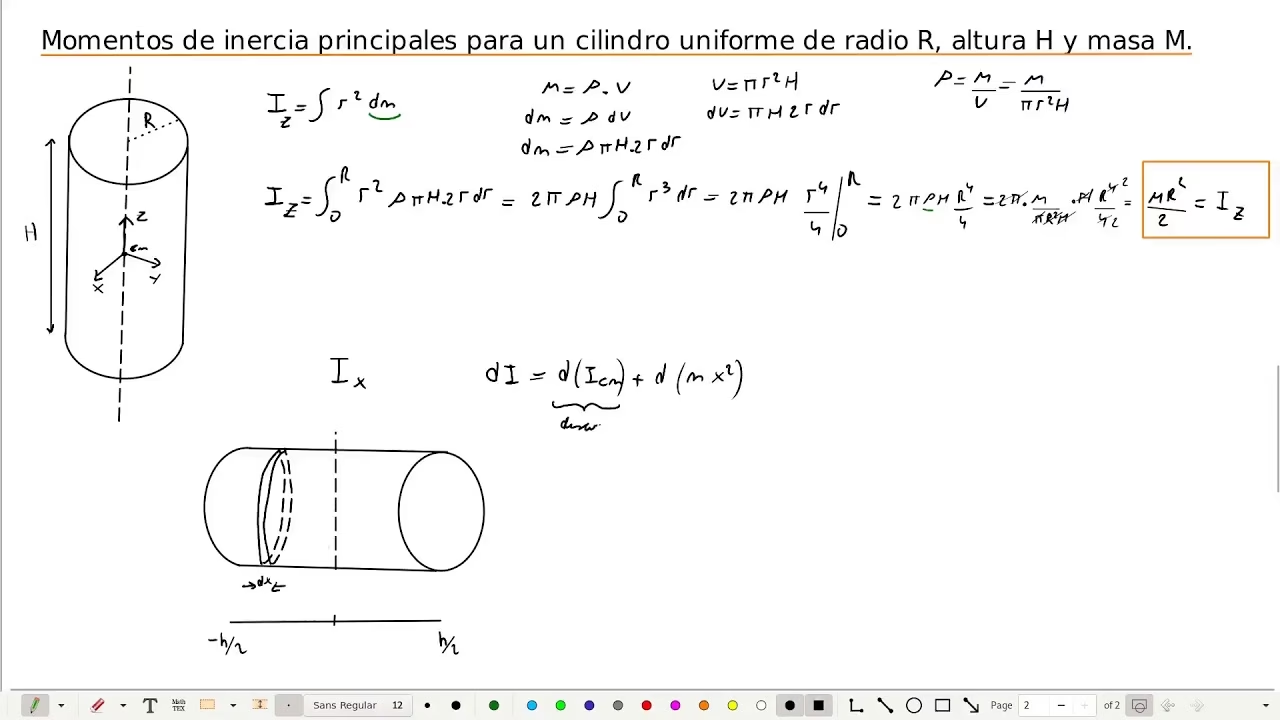
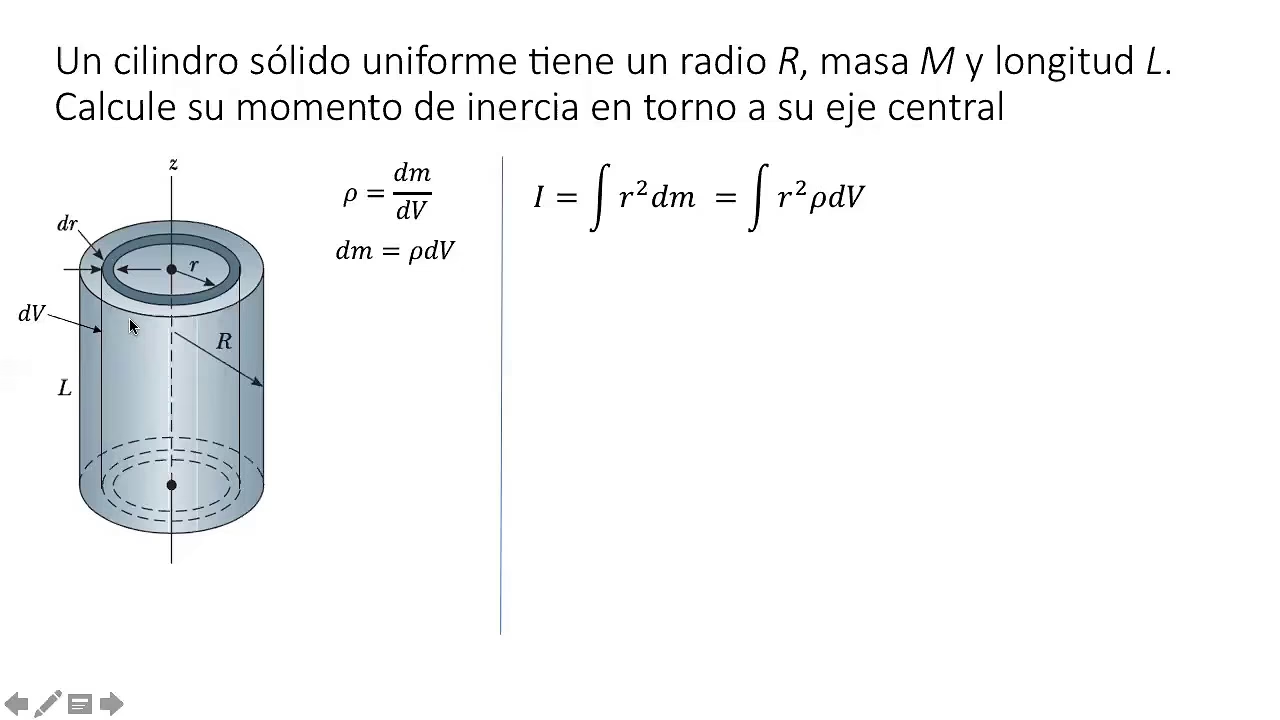
Cilindro Macizo Homogéneo
Si consideramos un cilindro macizo homogéneo de radio R, altura h y masa M, el cálculo es más complejo porque la masa no está concentrada a una única distancia del eje. Debemos integrar sobre el volumen, considerando elementos de masa dm = ρdV, donde ρ es la densidad del material y dV es un elemento de volumen. Para este caso, consideramos películas cilíndricas delgadas de radio r y espesor dr, de modo que dV = 2πrh dr.
Izz = ∫M r2 dm = ∫V ρr2 dV
Sustituyendo dV y los límites de integración (de 0 a R para el radio):
Izz = ∫0R ρ(r2)(2πr h) dr = 2πρh ∫0R r3 dr = πρR4h/2
Dado que la densidad ρ = M / V = M / (πR2h), podemos sustituir ρ en la expresión:
Izz = (π (M / (πR2h)) R4h) / 2 = MR2/2
Así, el momento de inercia de un cilindro macizo alrededor de su eje central es la mitad del de una superficie cilíndrica de la misma masa y radio. Este resultado es también aplicable a un disco (cilindro de muy pequeño espesor).
Tabla Comparativa de Momentos de Inercia Comunes
Para facilitar los cálculos, es útil disponer de una tabla con los momentos de inercia de sólidos homogéneos comunes, respecto a ejes que pasan por su centro de masa (CM) y suelen ser ejes de simetría.
| Sólido | Eje de Rotación | Momento de Inercia |
|---|---|---|
| Superficie cilíndrica (anillo) de radio R, masa M | Eje del cilindro (central) | MR2 |
| Cilindro macizo de radio R, masa M | Eje del cilindro (central) | (1/2)MR2 |
| Cilindro hueco de radios R1, R2, masa M | Eje del cilindro (central) | (1/2)M(R12 + R22) |
| Varilla rectilínea de longitud H, masa M | Perpendicular por el centro | (1/12)MH2 |
| Paralelogramo de lados b, h, masa M | Perpendicular por el centro | M(b2 + h2)/12 |
| Cubo macizo de arista a, masa M | Cualquiera que pase por su centro | Ma2/6 |
| Esfera hueca de radio R, masa M | Cualquiera que pase por su centro | (2/3)MR2 |
| Esfera maciza de radio R, masa M | Cualquiera que pase por su centro | (2/5)MR2 |
Para muchos objetos redondos, el momento de inercia puede expresarse como I = γMR2, donde γ es un factor que depende de la geometría interna del objeto:
| Cuerpo | γ |
|---|---|
| Cilindro hueco | 1 |
| Cilindro macizo | 1/2 |
| Esfera hueca | 2/3 |
| Esfera maciza | 2/5 |
Momentos de Inercia para Cuerpos Continuos: Una Visión General
Los momentos de inercia pueden definirse no solo respecto a ejes, sino también a planos y puntos. En todos los casos, la definición implica integrar el producto de la masa diferencial por el cuadrado de la distancia al elemento geométrico de referencia.
Momentos de Inercia Respecto a los Planos Coordenados
Estos momentos se definen como la integral del cuadrado de la distancia de cada elemento de masa al plano coordenado correspondiente:
- I1 = ∫ dm x12
- I2 = ∫ dm x22
- I3 = ∫ dm x32
En notación XYZ, esto es Ix = ∫ dm x2, Iy = ∫ dm y2, Iz = ∫ dm z2.
Momentos de Inercia Respecto a los Ejes Coordenados
Aquí, el integrando es el cuadrado de la distancia de cada elemento del sólido al eje coordenado correspondiente:
- I11 = ∫ dm (x22 + x32) = ∫ dm (y2 + z2) = Ixx
- I22 = ∫ dm (x12 + x32) = ∫ dm (x2 + z2) = Iyy
- I33 = ∫ dm (x12 + x22) = ∫ dm (x2 + y2) = Izz
Momento de Inercia Respecto a un Punto
El momento de inercia respecto a un punto, como el origen de coordenadas, se calcula integrando el cuadrado de la distancia de cada punto del sólido a ese punto:
IO = ∫ dm (x12 + x22 + x32) = ∫ dm (x2 + y2 + z2) = ∫ dm r2
Relaciones entre Momentos de Inercia Cartesianos
Existen relaciones útiles entre los momentos de inercia definidos con respecto a planos y ejes cartesianos:
- I11 = I2 + I3
- I22 = I1 + I3
- I33 = I1 + I2
- IO = (I11 + I22 + I33) / 2
Estas relaciones son inmediatas a partir de las definiciones. Por ejemplo, I2 + I3 = ∫ dm x22 + ∫ dm x32 = ∫ dm (x22 + x32) = I11. Es importante destacar que todos los momentos de inercia (I1, I2, I3, I11, etc.) son siempre valores positivos, ya que son sumas de cuadrados.
Productos de Inercia
Además de los momentos de inercia, el tensor de inercia incluye los productos de inercia. Estas magnitudes mezclan las distancias de cada punto del sólido a dos planos coordenados diferentes:
- P12 = ∫ dm x1x2
- P13 = ∫ dm x1x3
- P23 = ∫ dm x2x3
En notación XYZ, se escriben como Pxy, Pxz, Pyz. A diferencia de los momentos de inercia, los productos de inercia pueden ser tanto positivos como negativos, y siempre se cumple que Pij = Pji.
Teoremas Clave para el Cálculo de Momentos de Inercia
Existen teoremas que simplifican enormemente el cálculo de momentos de inercia cuando el eje de rotación no pasa por el centro de masa o cuando se trata de cuerpos planos.
Teorema de Steiner (o de los Ejes Paralelos)
Este teorema es fundamental porque nos permite calcular el momento de inercia de un cuerpo respecto a un eje arbitrario si conocemos el momento de inercia respecto a un eje paralelo que pasa por el centro de masas (CM) del sólido. Si IG es el momento de inercia respecto al eje que pasa por el CM (ΔG), y queremos calcular IΔ respecto a un eje paralelo Δ situado a una distancia d del primero, la relación es:
IΔ = IΔG + Md2
Donde M es la masa total del sólido. Este teorema nos indica que el momento de inercia es mínimo cuando el eje de rotación pasa por el centro de masas.
Por ejemplo, si una varilla de masa M y longitud H tiene un momento de inercia IG = MH2/12 respecto a un eje perpendicular que pasa por su centro, su momento de inercia I respecto a un eje perpendicular que pasa por uno de sus extremos (a una distancia d = H/2 de su CM) será:
I = IG + M(H/2)2 = MH2/12 + MH2/4 = MH2/3
Teorema de la Figura Plana (o de los Ejes Perpendiculares)
Este teorema es aplicable a cuerpos planos (o casi planos), donde una de sus dimensiones es mucho menor que las otras dos, como un disco o una chapa metálica. Si consideramos que el plano del objeto es el plano XY (es decir, z ≈ 0 para todos los puntos), los momentos de inercia respecto a los ejes X, Y y Z que pasan por un mismo punto en el plano (por ejemplo, el origen) se relacionan de la siguiente manera:
Izz = Ixx + Iyy
Esta relación es muy útil. Por ejemplo, para un disco circular macizo de radio R y masa M, sabemos que Izz (respecto a su eje central) es (1/2)MR2. Debido a la simetría del disco, Ixx (respecto a un diámetro en el eje X) debe ser igual a Iyy (respecto a un diámetro en el eje Y). Aplicando el teorema:
Izz = Ixx + Iyy = 2Ixx
Por lo tanto, Ixx = Iyy = Izz / 2 = (1/4)MR2. Así, podemos calcular el momento de inercia de un disco respecto a un eje diametral.
Radio de Giro
El radio de giro (K) es una magnitud que simplifica la caracterización del momento de inercia de un sólido respecto a un eje Δ. Se define como la distancia a la que se tendría que concentrar toda la masa M de un sólido para que su momento de inercia respecto a ese eje fuera el mismo que el del sólido real:
K = √(IΔ / M)
Es una medida de cómo se distribuye la masa del cuerpo con respecto a un eje. Un radio de giro grande indica que la masa está, en promedio, lejos del eje de rotación, lo que implica un mayor momento de inercia.
El Tensor de Inercia: La Herramienta Definitiva
Cuando el eje de rotación no coincide con un eje de simetría del cuerpo, el momento cinético y la velocidad angular ya no son paralelos. Para describir esta relación más compleja, utilizamos el Tensor de Inercia. Este es un tensor de segundo orden, que puede representarse como una matriz de 3x3:
IO = [[Ixx, -Pxy, -Pxz], [-Pyx, Iyy, -Pyz], [-Pzx, -Pzy, Izz]]
Donde Ixx, Iyy, Izz son los momentos de inercia respecto a los ejes coordenados, y Pxy, Pxz, Pyz son los productos de inercia. Es importante recordar que la matriz de inercia es simétrica (Pxy = Pyx, etc.).
El tensor de inercia es diferente para cada punto del espacio donde se calcule. A cada punto se le asigna un tensor, que describe la distribución de masa del sólido con respecto a ese punto. Aunque la representación matricial cambia con el sistema de coordenadas, el tensor subyacente es una propiedad intrínseca del sólido.
En notación de índices, el tensor de inercia Iij se define como:
Iij = ∫ dm (r2 δij - xixj)
Donde r2 = x12 + x22 + x32 (o x2 + y2 + z2) es el cuadrado de la distancia al origen, y δij es la Delta de Kronecker (1 si i=j, 0 si i≠j).
Teorema de Steiner para el Tensor de Inercia
Así como existe un teorema de Steiner para el momento de inercia escalar, también lo hay para el tensor de inercia. Si conocemos el tensor de inercia de un sólido en su centro de masas (IG), podemos calcularlo en cualquier otro punto A, cuya posición relativa al CM es el vector R = GA:
IA = IG + M[R2U - RR]
Donde M es la masa total, U es el tensor identidad (o matriz identidad), y RR es el producto diádico del vector R consigo mismo. En notación de índices, con R = [R1, R2, R3]:
Iij(A) = Iij(G) + M(R2δij - RiRj)
Momento de Inercia Respecto a un Eje Arbitrario Usando el Tensor
Una de las aplicaciones más poderosas del tensor de inercia es su capacidad para calcular el momento de inercia respecto a un eje arbitrario con gran facilidad. Si conocemos el tensor de inercia IO en un punto O que se encuentra en el eje de rotación, y la dirección del eje está dada por un vector unitario n, el momento de inercia IΔ respecto a ese eje es:
IΔ = n · IO · n
Esta expresión matricial es equivalente a la integral IΔ = ∫ dm a2, donde a es la distancia perpendicular de cada elemento de masa al eje.
Ejes Principales de Inercia
La matriz que representa el tensor de inercia es una matriz simétrica con coeficientes reales. Esto significa que siempre es diagonalizable. Se puede encontrar una base cartesiana particular donde la matriz de inercia es diagonal, es decir, todos los productos de inercia son cero:
IO = [[I11*, 0, 0], [0, I22*, 0], [0, 0, I33*]]
Los valores I11*, I22*, I33* son los momentos principales de inercia, y las direcciones de los ejes de esta base especial son las direcciones principales de inercia. Estas tres direcciones son siempre mutuamente perpendiculares.
La importancia física de los ejes principales de inercia radica en que, si un sólido rígido gira alrededor de uno de estos ejes, su momento cinético L será paralelo a su vector de velocidad angular ω. Esto simplifica enormemente el análisis del movimiento de rotación, ya que la relación se reduce a un escalar, como en los casos simples de simetría que vimos al principio.
Propiedades de los Ejes Principales de Inercia
Aunque las direcciones principales de inercia pueden variar de un punto a otro en el espacio, tienen propiedades muy importantes:
- Si un eje es una dirección principal de inercia en un punto, los productos de inercia que lo involucran son cero.
- Si un eje pasa por el centro de masas y es una dirección principal de inercia en un punto, lo es en todos los puntos a lo largo de ese eje.
- Un eje que es perpendicular a un plano de simetría de un cuerpo es una dirección principal de inercia en el punto donde interseca ese plano.
- Todo eje de simetría de un cuerpo es una dirección principal de inercia en todos sus puntos.
- Para sólidos planos, cualquier eje perpendicular al plano del sólido es una dirección principal de inercia en el punto de intersección.
En la práctica, para sólidos con alta simetría (como aros, discos, barras, cilindros, esferas), las direcciones principales de inercia a menudo coinciden con los ejes de simetría del objeto, lo que simplifica mucho su determinación sin necesidad de diagonalizar la matriz de inercia.
Preguntas Frecuentes sobre el Tensor de Inercia
¿Qué es el tensor de inercia y para qué sirve?
El tensor de inercia es una magnitud tensorial que describe cómo la masa de un cuerpo rígido se distribuye en el espacio con respecto a un punto o un sistema de coordenadas. Sirve para relacionar el momento cinético (angular) de un cuerpo con su velocidad angular, especialmente cuando el eje de rotación no coincide con un eje de simetría, donde el momento cinético y la velocidad angular no son paralelos.
¿Cuál es la diferencia entre momento de inercia y tensor de inercia?
El momento de inercia (escalar) es una medida de la resistencia a la rotación respecto a un eje específico, y solo aplica cuando el momento cinético y la velocidad angular son paralelos. El tensor de inercia es una generalización tridimensional de este concepto, representado por una matriz, que describe la inercia rotacional del cuerpo en cualquier dirección y es necesario cuando el momento cinético y la velocidad angular no son paralelos.
¿Cómo se calcula la inercia de un cilindro?
El cálculo de la inercia de un cilindro depende del tipo de cilindro (macizo o hueco) y del eje de rotación. Para un cilindro macizo homogéneo de masa M y radio R, rotando alrededor de su eje central, el momento de inercia es I = (1/2)MR2. Si es una superficie cilíndrica (anillo) de masa M y radio R, rotando alrededor de su eje central, es I = MR2. Para otros ejes, como uno que pasa por el centro de masa y es perpendicular al eje del cilindro, se requeriría el teorema de Steiner o el tensor de inercia completo.
¿Qué son los ejes principales de inercia?
Los ejes principales de inercia son un conjunto especial de tres ejes mutuamente perpendiculares, que pasan por un punto dado del cuerpo, para los cuales los productos de inercia son cero. Si el cuerpo gira alrededor de uno de estos ejes, su momento cinético es paralelo a su velocidad angular. A menudo coinciden con los ejes de simetría del objeto.
¿Cómo se aplica el teorema de Steiner (ejes paralelos)?
El teorema de Steiner se aplica para calcular el momento de inercia de un cuerpo respecto a un eje arbitrario si se conoce el momento de inercia respecto a un eje paralelo que pasa por el centro de masa del cuerpo. La fórmula es IΔ = IΔG + Md2, donde IΔG es el momento de inercia respecto al eje que pasa por el centro de masa, M es la masa total y d es la distancia perpendicular entre los dos ejes paralelos.
En resumen, el tensor de inercia es una herramienta esencial en la mecánica de cuerpos rígidos, que nos permite comprender y predecir el comportamiento rotacional de cualquier objeto, sin importar su forma o la complejidad de su movimiento. Dominar su cálculo y sus propiedades es un paso crucial para cualquier estudio avanzado en ingeniería, robótica, astronomía o física aplicada.
Si quieres conocer otros artículos parecidos a Calculando el Tensor de Inercia: Guía Completa puedes visitar la categoría Física.